
This guide illustrates how to construct a straightforward, light-sensitive robot capable of vibrating across surfaces. Although this robot won't tackle complex tasks, assembling it will aid in developing fundamental understanding of circuitry principles, which can be applied to more advanced robot projects in the future. Note that a budget of approximately $50 is required for this project if most of the necessary components aren't already on hand.
Step-by-Step Process
Acquiring Essential Components
Know Where to Source. You can procure the majority of the electrical components listed in this section from various stores specializing in electrical or automotive supplies. Alternatively, you can purchase all the listed parts online from platforms like Amazon and eBay.
- Consider shopping online for the components whenever possible. This allows for thorough product reviews and potential shipping discounts.
Acquire a set of hook-up wires. Hook-up wire, also known as circuit wire, consists of basic copper wire encased in plastic.
- When possible, opt for stranded hook-up wire over solid wire. Stranded wire is easier to handle and solder for this project's requirements.

Procure a coin cell battery holder. This serves as the body of your robot, housing the battery, facilitating main connections, and supporting the robot's 'feet'.
- Ensure that the battery holder includes a clip for securing the battery.
- The holder should feature two wire connectors—one positive and one negative—at its base. If the layout differs, the assembly instructions may not apply.
Obtain a 3V coin cell battery suitable for your holder. These flat, circular batteries are commonly used in watches and other small electronic devices. They are available in most department stores, though electronics or Home Depot stores may offer a better selection.

Source several ball bearings. To form the robot's 'feet,' you'll require three 5/16-inch diameter ball bearings. These can be salvaged from various household appliances (e.g., old DVD players) or purchased new from automotive or electronics retailers.

Purchase the necessary circuit components. To construct the circuit that prompts the robot to move in response to light exposure, you'll need the following items, all readily available online:
- One 4.7k resistor (1/2 W)
- One photoresistor (also known as a photo cell)
- One 2N3904 transistor
Locate or purchase a miniature vibration motor. These motors, reminiscent of those in older cell phones, are readily available online and in most electronics retailers. Ensure the chosen model has both red and blue wires for connections.
- If you have an old flip phone or pager, disassembling it may yield a suitable vibration motor.
- Utilizing a vibration motor lacking red and blue wires will render the assembly instructions ineffective.
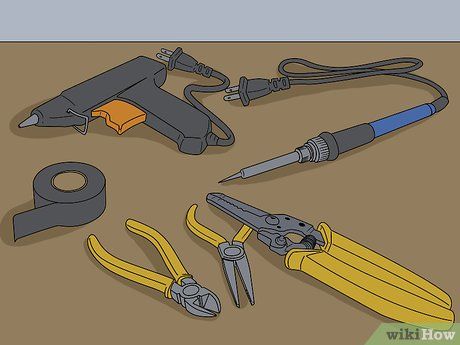
Ensure you possess the necessary tools. Prior to assembling your robot, verify that you have (and are proficient in using) the following tools:
- Soldering iron and solder
- Hot glue gun
- Wire cutters
- Wire strippers
- Needle-nose pliers
- Electrical tape (or an equivalent opaque, easily removable tape)
Constructing the Battery Compartment

Confirm battery compatibility with the holder. Prior to wire attachment, attempt to insert and secure the battery within the holder's slot using the built-in clamp. If the battery is incompatible in size, procure the appropriate size before proceeding with your robot.
- Consult the battery holder's packaging or documentation for supported battery sizes.
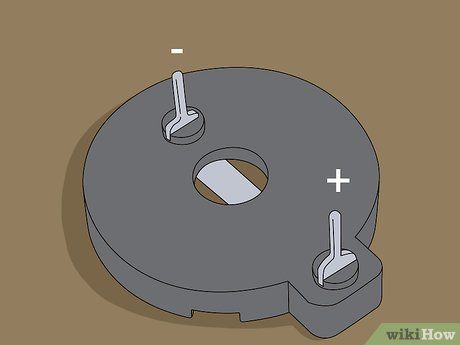
Identify the battery holder's positive and negative terminals. These terminals typically consist of two pins located on opposite sides of the holder's bottom; the pin associated with the securing clamp denotes the positive terminal, while the adjacent pin signifies the negative terminal.
- Familiarize yourself with the terminal polarity when connecting the motor and circuit to the battery holder.

Utilize needle-nose pliers to bend the connectors downward. Ensure the connectors are bent away from the center of the battery holder, facing outward.
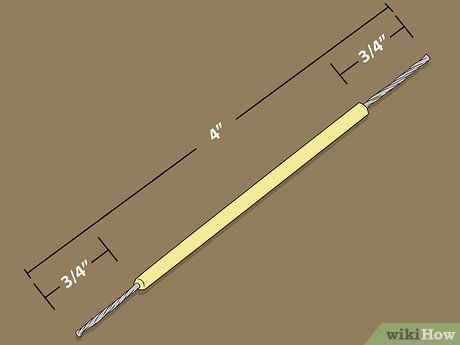
Prepare a hook-up wire for soldering. Cut approximately four inches of hook-up wire from the spool, then use wire strippers to remove 3/4 inch of insulation from each end.

Solder the wire to the positive terminal. Position one exposed end of the wire on the positive terminal, then employ a soldering iron and solder to secure the wire in place.
- Upon successful soldering, proceed to the next step.
Establishing the Circuit

Arrange the resistor, photoresistor, and transistor. These components constitute your robot's circuitry.
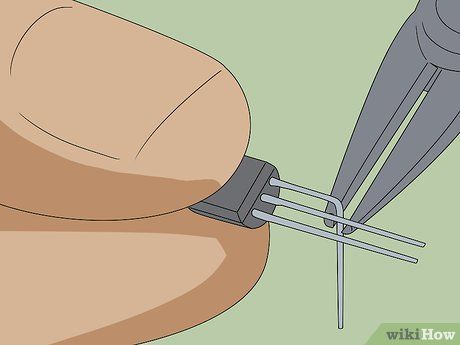
Curve one of the transistor's three leads away. While two of the transistor's wires (or 'leads') are utilized in the circuit, reserve one lead for later by bending it over using needle-nose pliers.
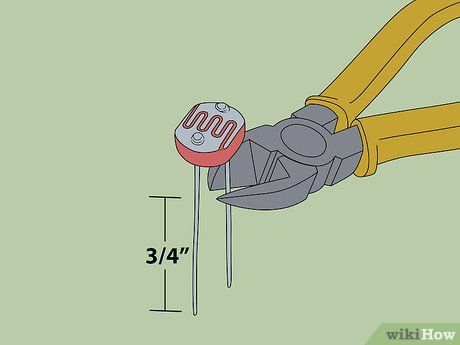
Shorten the photoresistor's leads. Typically, the photoresistor's two leads extend to about an inch to an inch and a half in length; utilize wire cutters to trim them, leaving approximately 3/4 of an inch.
- This adjustment facilitates easier mounting of the photoresistor later on.

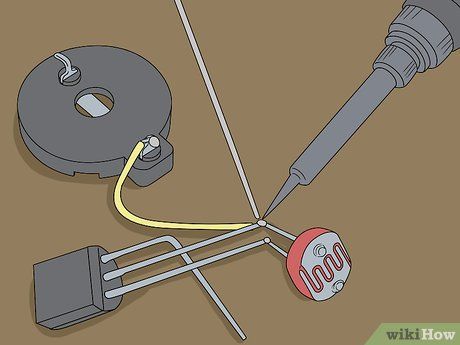
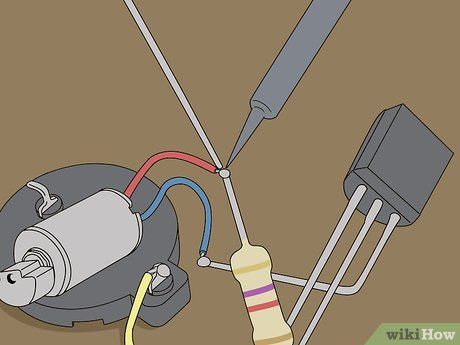
Link the battery compartment to the photoresistor. Take the remaining exposed end of the wire previously soldered to the battery holder, and solder it to one of the photoresistor's leads.
Connect the photoresistor to the transistor. Solder each of the photoresistor's leads to each of the unbent transistor leads.
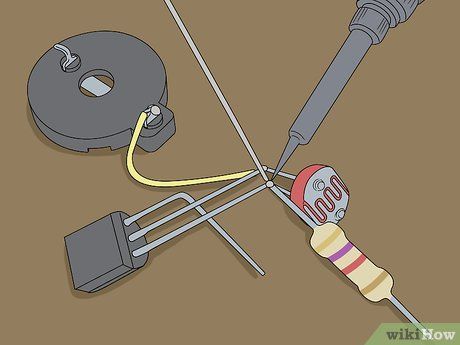
Attach the 4.7k resistor to the photoresistor. Solder one end of the resistor to the photoresistor lead not connected to the battery compartment wire.
- At this stage, your photoresistor should have one lead connected to a transistor lead and the battery compartment wire, and another lead connected to a transistor lead and the resistor lead.
Assembling the Robot

Mount the vibration motor. Apply a few dots of hot glue onto the underside of the battery compartment. Quickly position the vibration motor on top of the hot glue and hold it in place until the glue sets.
- Ensure the motor's movement isn't impeded by any components of the battery compartment. If necessary, readjust the placement of the motor.
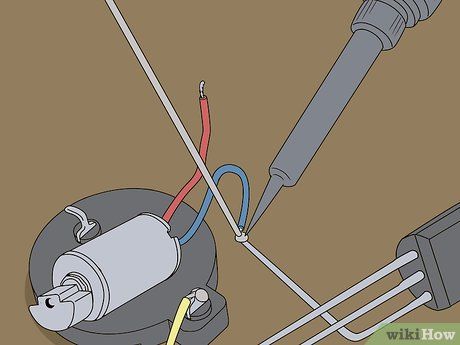
Wire the transistor to the vibration motor. Solder the motor's blue wire to the remaining (bent) lead of the transistor.
Connect the resistor and motor to the negative terminal. Solder both the free end of the resistor and the red wire of the motor to the negative terminal on the base of the battery compartment.
- Remember, the negative terminal is distinct from the first wire you soldered to the battery compartment.

Adhere the ball bearings to the underside of the battery compartment. The positioning is flexible, but it's recommended to affix a ball bearing on each side of the motor, with the third placed as convenient.

Shield the photoresistor's surface. Use a small strip of electrical tape to cover the flat area of the photoresistor's head. This action will prevent premature activation of the robot upon battery insertion.

Insert the battery into its slot. Raise the clamp situated atop the battery compartment, then insert the coin cell battery into the designated slot before releasing the clamp.

Activate your robot. Position the robot on a level, well-lit surface, and remove the tape covering the photoresistor. The robot should initiate vibration across the surface.
- Given the photoresistor's sensitivity to ambient light (not solely sunlight), covering it when the robot is idle is advisable.
Pointers
-
Experiment with various sizes of ball bearings or alternative mounting techniques, but avoid using excessively heavy objects, as they may hinder the robot's movement.
Precautions
- Exercise caution and adhere to safety protocols while soldering and operating the hot glue gun.