
Named OceanOneK, this robot can make its operator feel like they are directly underwater explorers. OceanOneK's design resembles a diver, complete with detailed features from arms to hands, along with 3D vision eyes, capturing the clearest underwater images possible.
Behind the robot is a computer system and 8 multi-directional thrusters that allow it to move carefully in complex terrains or fragile sunken ships.
 OceanOneK is currently diving deep beneath the ocean floor.
OceanOneK is currently diving deep beneath the ocean floor.When someone on the surface controls OceanOneK using devices, the robot's tactile feedback system will make that person feel the water resistance as well as the contours of objects underwater.
The advanced 3D vision and tactile feedback system of OceanOneK are so sophisticated that the operator feels as if they are truly diving deep into the ocean floor. Yet, they won't face any danger (such as high water pressure, lack of oxygen, etc.) that real divers often encounter.
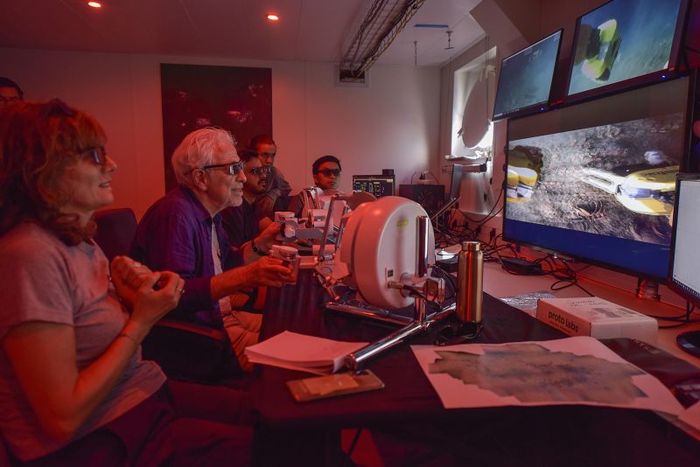
Robotics professor Oussama Khatib from Stanford University and his students collaborated with underwater archaeologists to begin deploying OceanOneK for dives in September. The research team also recently concluded an underwater expedition in July.
 OceanOneK and the divers
OceanOneK and the diversSo far, OceanOneK has discovered a sunken Beechcraft Baron F-GDPV airplane, the Italian steamship Le Francesco Crispi, a Roman ship from the second century off the coast of Corsica, a World War II P-38 Lightning airplane, and a submarine named Le Protée.
Among these, the Crispi ship lies deep beneath the surface of the Mediterranean Sea, about 1,640 feet (~500 meters). Professor Khatib of Stanford University, also the director of the Stanford Robotics Lab, described his unique experience, stating that he never imagined he would one day explore and touch a ship lying 500 meters deep beneath the ocean floor.
 Professor Khatib can sense the tactile feedback through the robot's feedback system.
Professor Khatib can sense the tactile feedback through the robot's feedback system.OceanOneK could mark the beginning of a future where robots engage in underwater exploration and undertake dangerous tasks for humans, such as repairing broken undersea fiber optic cables. They could help us understand the ocean in an entirely new way.
The precursor to OceanOneK is OceanOne, unveiled in 2016, when this robot participated in the expedition of the warship La Lune of King Louis XIV, lying 100 meters deep in the Mediterranean Sea and about 32 km south of France.

The idea to create OceanOne stemmed from the desire to research coral reefs in the Red Sea at depths beyond the normal range of divers. The Stanford research team aimed to create something that closely resembles the shape of a human diver, integrating artificial intelligence, advanced robotics, and tactile feedback.
OceanOne stands about 1.5 meters tall, and its brain can gauge the amount of force needed to handle delicate objects such as coral or art artifacts submerged without breaking them. Humans can control the robot, but it is also equipped with sensors and algorithms to operate autonomously and avoid collisions.
 OceanOne in the expedition of the warship La Lune
OceanOne in the expedition of the warship La LuneAfter OceanOne was designed to reach a maximum depth of 200 meters, researchers set a new goal of 1km. Thus, OceanOneK was born. The research team modified the robot's body structure using a special foam comprising glass microspheres to increase buoyancy and withstand pressure at 1,000 meters - more than 100 times what humans experience at sea level.
Professor Khatib and his research team's next target is space. He mentioned that the European Space Agency has expressed interest in OceanOneK. Humanoid robots participating in outer space missions may no longer be science fiction.
- Explore more in the Discovery section