

If the predictions of automotive visionaries hold true, we'll soon be living in a world where self-driving cars from companies like Tesla and other manufacturers will ferry us between destinations while we relax in the backseat. Although this ideal future seems to have gained momentum recently, engineers have been striving for autonomous vehicles since the early 1900s. Let's explore some captivating—and occasionally misguided—efforts to take the wheel out of human hands.
1. The Radio-Controlled Car That Led to Houdini’s Arrest
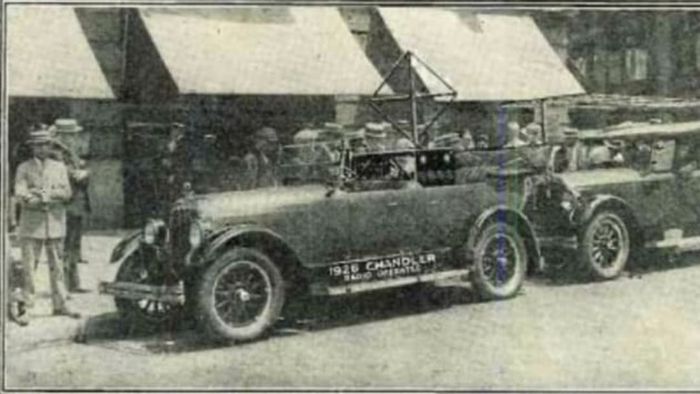 Francis Houdina's radio-controlled car, known as the 'American Wonder,' from around 1925. | Wikimedia Commons // CC BY-SA 4.0
Francis Houdina's radio-controlled car, known as the 'American Wonder,' from around 1925. | Wikimedia Commons // CC BY-SA 4.0In the summer of 1925, New Yorkers witnessed an extraordinary sight—a driverless car cruising down Broadway. The modified Chandler sedan, named the American Wonder, was the creation of Francis P. Houdina, a former U.S. Army electrical engineer. The car received radio signals through an antenna, which controlled its speed and steering. A second car, with the operators inside, followed close behind. The car could even honk its horn. While this glimpse into the future was fascinating, it ended in an anticlimactic fashion when the American Wonder collided with a vehicle carrying photographers.
The story takes an odd turn. The legendary escape artist Harry Houdini reportedly became so irritated by the confusion between him and Houdina, as people sometimes mistakenly sent mail intended for Houdini to Houdina, that he and his secretary, Oscar Teale, were arrested for breaking into Houdina’s office to retrieve letters meant for Houdini. The charges were eventually dropped.
Despite this bizarre turn of events, various versions of a 'phantom' car controlled by radio continued to appear in the following years, though not without consistent success. In 1932, an experimental car controlled by engineer J.J. Lynch crashed into a crowd in Hanover, Pennsylvania, injuring 12 people.
2. The Nebraska Test
While radio-controlled vehicles ultimately proved to be ineffective, many other methods were explored to get driverless cars on the road. In 1957, a test was conducted on U.S. 77 near the Nebraska 2 intersection outside Lincoln, Nebraska, where a Chevrolet was guided by wire coils embedded beneath the pavement. The concept was developed by state traffic engineer Leland Hancock, who enlisted electronics giant RCA to help with the automation efforts. The project was partially inspired by industrialist Norman Bel Geddes' vision of a driverless future, presented at the 1939 World’s Fair. During the demonstration, an RCA representative used coils attached to the car's bumper to communicate with the underground guide wire. To demonstrate the car's guidance by coils and radio transmission, the windshield was blacked out. Although Hancock believed the system was a promising method for driverless control, the high costs and challenges involved in laying the guide wires ultimately made it impractical.
3. The Titanium Firebird
Considered to be the first car made entirely of titanium, the Firebird II from General Motors caused a stir in 1956 when the company proposed it could be operated by an electronic strip under the road. A retractable steering wheel would fold away, taking control of the car and allowing it to be driven by an autopilot system overseen by traffic control towers similar to those used in aviation. GM also predicted the future use of voice-activated systems and display screens. This visionary car took to the streets for a demonstration in Princeton, New Jersey, in 1960 but never went further than that, though you can watch the impressive promotional video above.
4. The Aeromobile Arrives (Sort Of)
In 1961, Popular Science featured William Bertelsen, a physician and amateur engineer, who created a hovercraft vehicle known as the Aeromobile. His design envisioned a vehicle gliding through 'airways' rather than on traditional highways, traveling at high speeds while passengers relaxed and read the newspaper. Bertelsen did manage to build an Aeromobile, the Aeromobile 35B, which used a downward stream of air for propulsion, providing better steering. However, the dream of high-speed air cars never came to fruition. Meanwhile, engineers in Britain had already made significant advancements in hovercraft technology, overshadowing American efforts and dampening interest in these vehicles within the U.S.
5. The Ghost Car
In 1968, German automaker Continental developed a method for autonomous vehicle operation while testing tire durability. The demonstration, held at the Contidrom test track in the Lüneburg Heath, was a collaboration with Siemens, Westinghouse, and researchers from Munich and Darmstadt universities. A guide wire embedded in the road kept the car on course. If the car deviated, sensors detected the shift and automatically steered it back into alignment. The system also allowed a control station to remotely command the vehicle to accelerate or brake.
The 'e-car' was regularly used on the track, impressing observers by speeding around with no one at the wheel. Sheets of glass placed along the track provided engineers with data on how different tire treads performed under various conditions. This technique continued to be used until 1974.
6. The Ambulance of the Future
In 1989, researchers at Carnegie Mellon University used ALVINN (Autonomous Land Vehicle In a Neural Network) to navigate around campus. This computer-powered vehicle, a former Army ambulance, featured a CPU the size of a refrigerator and was powered by a 5000-watt generator. The vehicle could navigate using the information in its network, rather than relying on a mapped-out grid. ALVINN is considered a precursor to the modern self-driving vehicle networks in use today. In 1995, the team drove a 1990 Pontiac Trans Sport 3100 miles across the U.S., with the car steering itself while a human operated the brakes and throttle.
7. The Car with Eyes
In 1994, German engineer Ernst Dickmanns realized his vision of a self-driving car by successfully putting two Mercedes 500 SEL limousines on a public road in Paris, France, without a human driver. The cars were equipped with an onboard computer system that managed the wheels, gas, and brakes. Dickmanns's journey started in 1986 when he equipped a Mercedes van with a computer and cameras to interpret road signs and lane markings. This culminated in the 1994 test drive in real traffic, with drivers on standby to take control if necessary. While Dickmanns's pioneering work foreshadowed many of the surveillance technologies seen in today's self-driving cars, his investors were seeking quicker results and eventually withdrew their support.