
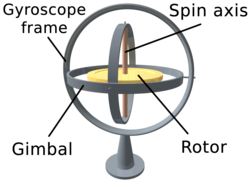
Con quay hồi chuyển là một thiết bị được sử dụng để đo lường hoặc duy trì hướng đi, dựa trên nguyên lý bảo toàn mô men động lượng. Cụ thể, con quay cơ học bao gồm một bánh xe hoặc đĩa quay với trục quay tự do theo mọi hướng. Độ thay đổi của phương hướng chủ yếu phụ thuộc vào mô men xoắn bên ngoài hơn là vào vận tốc quay của con quay, điều này giúp duy trì phương hướng gần như cố định nhờ vào sự tối thiểu hóa mô men xoắn thông qua các khớp vạn năng (gimbal).
Ngoài ra, có những loại con quay hoạt động dựa trên các nguyên lý khác như thiết bị điện, bao gồm con quay MEMS vi mạch, laser vòng trạng thái rắn, con quay sợi quang học, và con quay lượng tử siêu nhạy được sử dụng trong các thiết bị điện tử.
Con quay có nhiều ứng dụng, chẳng hạn như trong hệ thống định vị quán tính nơi la bàn từ không hoạt động được (như trong kính thiên văn Hubble) hoặc không đủ chính xác (như ICBM), cũng như để ổn định các thiết bị bay như máy bay trực thăng điều khiển bằng tín hiệu radar hoặc máy bay không người lái. Với độ chính xác cao, con quay cũng được sử dụng trong khai thác mỏ hầm lò để định hướng.
Đặc điểm
Con quay hồi chuyển có một số đặc điểm nổi bật như tiến động và chương động. Nó có thể được dùng như la bàn con quay, bổ sung hoặc thay thế la bàn từ trên tàu, máy bay và tàu vũ trụ, hỗ trợ sự ổn định cho các thiết bị như kính thiên văn Hubble, xe đạp, xe máy và tàu thuyền, hoặc là một phần của hệ thống dẫn đường quán tính. Hiệu ứng hồi chuyển còn được ứng dụng trong boomerang và yo-yo. Các thiết bị quay khác như bánh đà cũng hoạt động tương tự con quay hồi chuyển, mặc dù không dùng hiệu ứng hồi chuyển.
Phương trình cơ bản mô tả hành vi của con quay hồi chuyển là:
Các vec-tơ τ và L đại diện cho mô men xoắn và mô men động lượng, trong đó đại lượng vô hướng I là mô men quán tính, vec-tơ ω biểu thị vận tốc góc, và vec-tơ α là gia tốc góc.
Dựa vào phương trình trên, mô men xoắn τ luôn vuông góc với trục quay và mô men động lượng L, do đó tạo ra chuyển động quanh trục vuông góc với cả τ và L. Hiện tượng này được gọi là tiến động. Vận tốc góc của tiến động ΩP được tính bằng tích vectơ:
Khi con quay chịu tác động của một mô men xoắn không đổi τ, vận tốc tiến động ΩP của nó có mối quan hệ tỉ lệ nghịch với độ lớn của mô men động lượng L, với công thức tính độ lớn mô men động lượng như sau:
Trong đó θ là góc giữa hai vectơ ΩP và L. Khi con quay giảm tốc độ quay (ví dụ do tác động của ma sát), mô men động lượng giảm, làm tăng vận tốc tiến động. Quá trình này tiếp tục cho đến khi con quay không còn quay đủ nhanh để duy trì sự cân bằng, dẫn đến việc nó dừng lại và rơi xuống, chủ yếu do ma sát làm cản trở tiến động từ một nguồn tiến động khác.
Theo quy tắc, ba vectơ - mô men xoắn, quay và tiến động - hoạt động theo quy tắc bàn tay trái.
Để xác định hướng của hiệu ứng con quay hồi chuyển một cách dễ dàng, bạn chỉ cần nhớ rằng một bánh xe lăn có xu hướng ngả ngược lại hướng nghiêng của nó khi nghiêng sang một bên.
Liên kết ngoài
- Bài giảng Giáng sinh của Viện Hoàng gia năm 1974–75 do Giáo sư Eric Laithwaite thực hiện
- Robot Một Bánh - Gyrostat của Olga Kapustina và Yuri Martynenko thuộc Dự án Wolfram Demonstrations
- Chiếc Đỉnh Nhỏ Hướng Nòng Súng Lưu trữ ngày 10 tháng 7 năm 2011 tại Wayback Machine, tác giả Gold Sanders, Popular Science tháng 7 năm 1945
- Apostolyuk V. Lý Thuyết và Thiết Kế của Con Quay Vi Mạch Lưu trữ ngày 27 tháng 9 năm 2007 tại Wayback Machine