
Nếu con người đi như robot, kỹ sư đã hoàn thiện được việc đi bộ hỗ trợ cơ khí không tốn sức lực. Nhưng với những người nhảy nhót, người đi nhanh, người đi đều bước... Thói quen, bệnh tật và khuyết tật có thể ảnh hưởng đến cách đi của mỗi người một cách đặc biệt. Một exoskeleton lý tưởng cần phải dễ dàng tiếp cận và cá nhân hóa.
Exoskeleton giống như Chipotle vậy, chưa thực sự tồn tại. Máy tính vẫn gặp khó khăn trong việc dự đoán cách con người sẽ di chuyển—họ đang di chuyển. Từ góc độ dữ liệu, con người là một tập hợp nhiễu loạn, theo Katherine Poggensee, một nhà nghiên cứu biomechatronics tại Đại học Carnegie Mellon. Ngoài ra, “họ có não, nên họ thích nghi theo thời gian.” Và mặc dù con người nói chung tìm cách dễ nhất để thực hiện bất kỳ hành động nào, rất ít người có nhận thức về cảm giác vật lý và không gian để giải thích tại sao một bước đi lại dễ dàng hơn bước đi khác. Đó là lý do tại sao các nhà nghiên cứu đang sử dụng thuật toán để làm cho exoskeleton hiệu quả hơn.
Cho đến nay, việc tự động điều chỉnh lực và thời gian của exoskeleton nhanh hơn và tốt hơn so với việc điều chỉnh bằng tay. Thứ Năm, trong một bài báo được công bố trên tạp chí Khoa học, Poggensee và các nhà nghiên cứu đồng nghiệp của cô mô tả một thuật toán điều chỉnh exoskeleton để hỗ trợ tốt nhất người sử dụng. Để làm điều đó, họ sử dụng một loại tối ưu hóa cũng đã giúp quản lý cách các nhân vật hoạt hình tương tác với môi trường của họ trong CGI.
Thay vì cung cấp hỗ trợ tiêu chuẩn cho người dùng, các thuật toán điều khiển này tự thiết lập mình như một bác sĩ mắt đang chọn kính trong khi hỏi “tốt hơn, hay tồi hơn?” Nhưng thay vì thực sự hỏi người dùng, các thuật toán dựa vào phản hồi từ cảm biến. Ví dụ, để giảm thiểu năng lượng cần thiết để đi bộ, chúng theo dõi hô hấp để tính toán tỷ lệ trao đổi chất, sau đó tối ưu hóa để giảm thiểu tiêu hao calo.
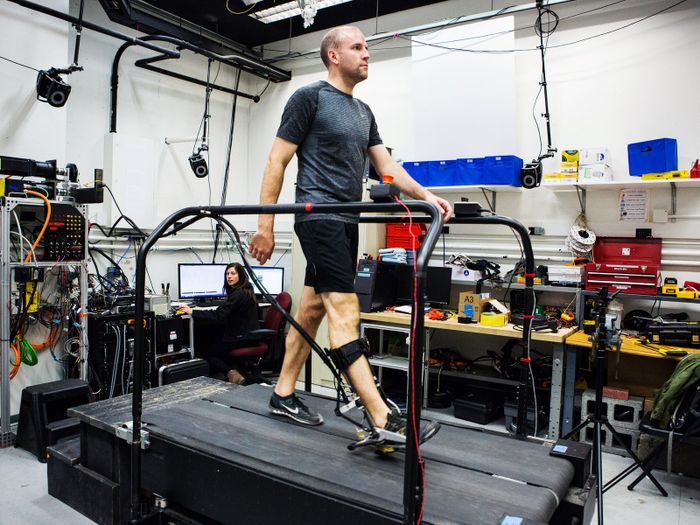
Việc điều chỉnh theo thuật toán này chỉ có thể xảy ra trong phòng thí nghiệm, trên máy chạy bộ, nơi có máy móc để thực hiện và phân tích các đo lường bổ sung này. Ý tưởng là cuối cùng, bạn có thể được trang bị exoskeleton hoặc chân giả robot của bạn tại một phòng khám, sau đó chuyển hồ sơ cá nhân hóa của bạn ra thế giới bên ngoài. Trong nghiên cứu này cũng như các nghiên cứu khác, exoskeleton được điều chỉnh tự động thành công giảm năng lượng cần thiết để đi bộ.
Điều này là một cải tiến so với các phiên bản trước của việc điều chỉnh exoskeleton, chúng chậm hơn và trong một số trường hợp, yêu cầu nỗ lực hơn so với việc đi bộ không hỗ trợ thông thường. Đối với các phương pháp đơn giản hơn dựa vào việc duyệt qua nhiều lựa chọn khác nhau một cách cương quyết, “số liệu trở nên rất khó để xử lý,” theo Daniel Ferris, người đã phát triển các thuật toán tương tự để điều chỉnh exoskeleton. Có các phương pháp toán học khác nhau để tự động hóa việc điều chỉnh này, nhưng những phương pháp hiệu quả nhất đều bắt đầu bằng cách đoán xem con người sẽ phản ứng như thế nào, sau đó theo dõi phản ứng thực tế của họ trong khi đưa ra các điều chỉnh khác nhau.
Bởi vì các thuật toán cũng tích hợp tính ngẫu nhiên vào cấu trúc của chúng, các bộ điều khiển exoskeleton phát triển khác nhau cho mỗi người đi bộ. Trong phương pháp được công bố tuần này, bộ điều khiển bắt đầu bằng cách thử tám hồ sơ điều chỉnh khác nhau. Dựa trên những hồ sơ nào hoạt động tốt, nó tạo ra tám hồ sơ mới để thử, với một vài thẻ bài hoang dã được đưa vào. Đôi khi thẻ bài hoang dã tốt hơn, và đôi khi tồi hơn, nhưng tất cả đều thúc đẩy bộ điều khiển phát triển. Khi người sử dụng dần dần thích nghi với sự hỗ trợ từ exoskeleton, vòng điều khiển cũng thích nghi với người sử dụng.
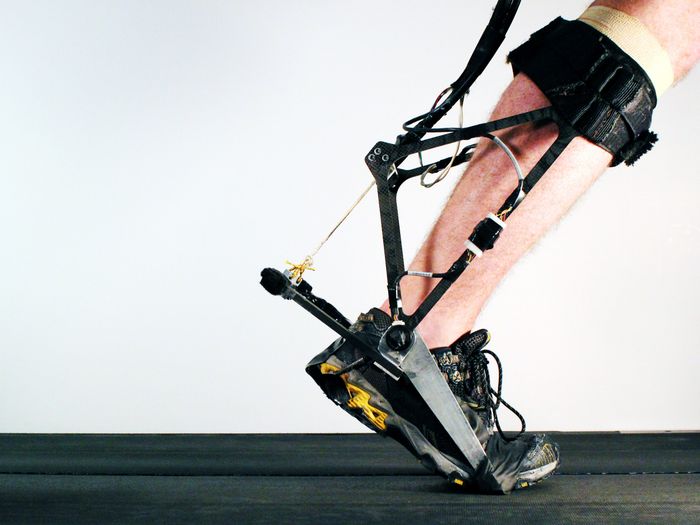
Đối với các thử nghiệm minh chứng ý tưởng của Poggensee, 11 người tham gia đã đeo một chiếc exoskeleton mắc ở mắt cá chân trên một đôi giày và đi dạo trên máy chạy bộ. Khi họ đi, một chiếc khẩu trang hô hấp đo lường lượng oxy họ hít vào và lượng carbon dioxide họ thở ra, tính toán chi phí năng lượng khi đi bộ. Trong khi đó, thuật toán điều chỉnh đã lặp lại bốn bộ tám mẫu khác nhau của lực torque hỗ trợ, thay đổi về thời gian và lượng lực.

Sau khoảng một giờ đi dạo như vậy, thuật toán đã xác định thời gian và torque tối ưu để giảm thiểu chi phí năng lượng của từng bước đi của mỗi người. Mẫu lý tưởng của mỗi người tham gia khác nhau—một chút hỗ trợ hơn ở toe-off, lực ít hơn ở giữa bước đi—vì vậy khi nhìn vào các hồ sơ torque của tất cả những người đi bộ, bạn sẽ thấy “rất nhiều hình dạng khác nhau,” theo Poggensee.
Chi phí năng lượng, tất nhiên, chỉ là một cách để đánh giá hiệu suất của exoskeleton. Các nghiên cứu như thế này cũng có thể đo lường hoạt động bằng cách theo dõi điện áp qua cơ bắp cục bộ, sử dụng phương pháp gọi là điện cơ cơ bắp. Nhưng cũng có rất nhiều chỉ số khác để tối ưu hóa, như nhịp tim, tốc độ cử động cơ, và cân bằng. Hoặc nếu bạn muốn nhìn sâu vào phần tùy ý, sự thoải mái và nỗ lực cảm nhận.
Xét đến những yếu tố bổ sung đó—và mở rộng những yếu tố đó để giải quyết một phạm vi nhu cầu rộng hơn—có thể là một thách thức lớn hơn, theo Ferris. Anh chỉ ra rằng các phương pháp tối ưu hóa này hoạt động tốt với một số thông số trong phòng thí nghiệm, nhưng thế giới thực sự yêu cầu kiểm soát nhiều núm điều chỉnh với gần như vô số cài đặt. Điều hướng trong một toa tàu đông người, ví dụ, đòi hỏi sự chú ý đến không chỉ năng lượng. Còn cả việc giảm thiểu tiếp xúc với nách và việc điều chỉnh thêm cho sự rộng lớn. Trước khi những yếu tố đó có thể được tối ưu hóa, chúng cần được đo lường—điều này có thể là công việc cho một thuật toán hoàn toàn khác.