
Một bộ điều khiển tỷ lệ tích phân vi phân (PID - Proportional Integral Derivative) là một cơ chế điều khiển phản hồi tổng quát được áp dụng rộng rãi trong các hệ thống công nghiệp. Bộ điều khiển PID là loại điều khiển phản hồi phổ biến nhất, thực hiện việc điều chỉnh giá trị 'sai số' tức là sự khác biệt giữa giá trị đo được và giá trị mong muốn. Bộ điều khiển này tối ưu hóa sai số bằng cách điều chỉnh đầu vào điều khiển. Trong trường hợp thiếu mô hình toán học của hệ thống, bộ điều khiển PID vẫn là lựa chọn tốt nhất. Tuy nhiên, để đạt hiệu quả tối ưu, các tham số PID cần phải được điều chỉnh phù hợp với đặc tính của hệ thống, dù kiểu điều khiển giống nhau nhưng tham số cần phụ thuộc vào yêu cầu cụ thể của hệ thống.
Thuật toán bộ điều khiển PID bao gồm ba tham số chính, do đó nó còn được gọi là điều khiển ba thành phần: các giá trị tỉ lệ, tích phân và đạo hàm, được ký hiệu là P, I, và D. Giá trị tỉ lệ quyết định ảnh hưởng của sai số hiện tại, giá trị tích phân xác định ảnh hưởng của tổng sai số trong quá khứ, và giá trị đạo hàm xác định ảnh hưởng của tốc độ thay đổi sai số. Tổng hợp của ba tác động này giúp điều chỉnh quá trình thông qua các yếu tố như vị trí của van điều khiển hoặc bộ nguồn của phần tử gia nhiệt. Vì vậy, các giá trị này giúp làm rõ mối quan hệ theo thời gian: P phản ánh sai số hiện tại, I phản ánh tích lũy sai số trong quá khứ, và D dự đoán các sai số tương lai dựa trên tốc độ thay đổi hiện tại.
Bằng cách điều chỉnh ba hằng số trong thuật toán PID, bộ điều khiển có thể được điều chỉnh để phù hợp với các yêu cầu thiết kế đặc biệt. Đáp ứng của bộ điều khiển có thể được mô tả qua độ nhạy với sai số, khả năng vượt quá điểm đặt và sự dao động của hệ thống. Cần lưu ý rằng ứng dụng của thuật toán PID trong điều khiển không đảm bảo tính tối ưu hoặc sự ổn định tuyệt đối của hệ thống.
Một số ứng dụng có thể chỉ cần sử dụng một hoặc hai thành phần điều khiển tùy thuộc vào hệ thống. Điều này được thực hiện bằng cách điều chỉnh các đầu ra không mong muốn về 0. Bộ điều khiển PID có thể trở thành bộ điều khiển PI, PD, P hoặc I nếu thiếu các thành phần không cần thiết. Trong đó, bộ điều khiển PI khá phổ biến vì nó có phản hồi vi phân nhạy với nhiễu đo lường, nhưng nếu thiếu thành phần tích phân, hệ thống có thể không đạt được giá trị mong muốn.
Lưu ý: Trong lý thuyết và ứng dụng điều khiển, có nhiều quy ước khác nhau trong việc đặt tên các biến liên quan.
Kiến thức cơ bản về vòng điều khiển
Một ví dụ dễ hiểu về vòng điều khiển là việc điều chỉnh vòi nước nóng và lạnh để duy trì nhiệt độ nước mong muốn ở đầu vòi. Thường thì chúng ta phải trộn nước nóng và lạnh và kiểm tra nhiệt độ bằng cách cảm nhận bằng tay. Dựa trên phản hồi này, chúng ta điều chỉnh van nóng và van lạnh cho đến khi đạt được nhiệt độ ổn định theo mong muốn.
Giá trị cảm biến nhiệt độ nước là giá trị tương tự (analog), được sử dụng để đo lường biến quá trình (PV). Nhiệt độ mong muốn được gọi là điểm đặt (SP). Đầu vào của vòng điều khiển (vị trí van nước) được gọi là biến điều khiển (MV). Hiệu số giữa nhiệt độ đo và điểm đặt được gọi là sai số (e), dùng để xác định khi nào nước quá nóng hay quá lạnh.
Sau khi đo nhiệt độ (PV) và tính toán sai số, bộ điều khiển sẽ quyết định khi nào và bao nhiêu mức mở của van (MV) cần thay đổi. Khi van được mở lần đầu tiên, bộ điều khiển có thể chỉ mở một chút nếu cần nước ấm hoặc mở hoàn toàn nếu cần nước rất nóng. Đây là ví dụ về điều khiển tỉ lệ đơn giản. Nếu nước không nóng nhanh chóng, bộ điều khiển có thể tăng tốc độ chu trình bằng cách từ từ mở van nóng thêm. Đây là ví dụ về điều khiển tích phân. Sử dụng chỉ hai phương pháp điều khiển tỉ lệ và tích phân có thể gây ra dao động nhiệt độ giữa nóng và lạnh vì bộ điều khiển điều chỉnh van quá nhanh và vượt quá điểm đặt.
Để đạt được sự điều chỉnh dần dần đến nhiệt độ mong muốn (SP), bộ điều khiển cần phải giảm dần sự dao động dự đoán trong tương lai. Điều này có thể thực hiện thông qua phương pháp điều khiển vi phân.
Khi sai số nhỏ, giá trị điều chỉnh có thể quá lớn với bộ điều khiển có độ lợi cao, dẫn đến hiện tượng vượt quá điểm đặt. Nếu bộ điều khiển lặp đi lặp lại hành động này, sẽ gây ra dao động xung quanh điểm đặt, tăng giảm theo hình sin cố định. Nếu dao động gia tăng theo thời gian, hệ thống sẽ không ổn định; nếu dao động giảm theo thời gian, hệ thống ổn định. Nếu dao động duy trì tại một biên độ cố định, hệ thống ổn định biên độ. Con người thường tránh dao động này nhờ khả năng học hỏi, trong khi bộ điều khiển PID đơn giản không có khả năng học tập và cần phải được điều chỉnh phù hợp. Việc chọn độ lợi hợp lý để điều khiển hiệu quả gọi là điều chỉnh bộ điều khiển.
Nếu bộ điều khiển bắt đầu từ trạng thái ổn định với sai số bằng 0 (PV=SP), các thay đổi sau đó phụ thuộc vào những biến đổi trong tín hiệu đầu vào đo được hoặc không đo được khác tác động đến quá trình điều khiển, ảnh hưởng đến đầu ra PV. Các biến tác động khác với MV gọi là nhiễu. Bộ điều khiển thường được sử dụng để loại bỏ nhiễu và/hoặc điều chỉnh điểm đặt. Những thay đổi nhiệt độ nước cung cấp là ví dụ về nhiễu trong điều khiển nhiệt độ vòi nước.
Về lý thuyết, một bộ điều khiển có thể được áp dụng cho bất kỳ quá trình nào có đầu ra đo được (PV), một giá trị lý tưởng đã biết cho đầu ra (SP) và đầu vào chu trình (MV) để tác động đến PV phù hợp. Các bộ điều khiển được sử dụng trong công nghiệp để điều chỉnh nhiệt độ, áp suất, tốc độ dòng chảy, tổng hợp hóa chất, tốc độ và các đại lượng khác có thể đo lường. Ví dụ thực tế là hệ thống điều khiển hành trình trên ô tô.
Bộ điều khiển PID thường được lựa chọn cho nhiều ứng dụng khác nhau nhờ vào lý thuyết đáng tin cậy, đã được kiểm chứng qua thời gian, và thiết kế đơn giản dễ cài đặt cũng như bảo trì.
Khái niệm điều khiển PID
Phần này chỉ đề cập đến dạng điều khiển PID song song hoặc không tương tác. Vui lòng tham khảo tài liệu khác để biết thêm về các dạng điều khiển khác.
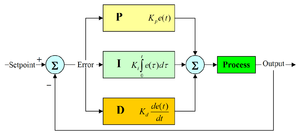
Sơ đồ điều khiển PID được gọi theo ba khâu điều chỉnh của nó, tổng hợp từ ba khâu này tạo thành biến điều khiển (MV). Cụ thể như sau:
bao gồm
- , , và là các thành phần đầu ra của ba khâu trong bộ điều khiển PID, được định nghĩa như sau.
Khâu tỉ lệ
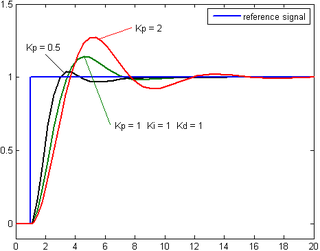
Khâu tỉ lệ (hay còn gọi là độ lợi) điều chỉnh giá trị đầu ra tỷ lệ thuận với sai số hiện tại. Đáp ứng tỷ lệ có thể được điều chỉnh bằng cách nhân sai số với một hằng số Kp, được gọi là hệ số tỷ lệ.
Khâu tỉ lệ được xác định bởi:
bao gồm
- : Thừa số tỉ lệ của đầu ra
- : Hệ số tỉ lệ, thông số điều chỉnh
- : Sai số
- : Thời gian hoặc thời điểm hiện tại
Khi hệ số của khâu tỉ lệ lớn, sự thay đổi đầu ra rất lớn dù sai số chỉ thay đổi một chút. Nếu hệ số quá cao, hệ thống sẽ trở nên không ổn định (tham khảo phần điều chỉnh vòng). Ngược lại, hệ số thấp dẫn đến đầu ra nhỏ trong khi sai số đầu vào lớn, làm cho bộ điều khiển hoạt động kém nhạy và đáp ứng chậm. Nếu hệ số quá thấp, hiệu quả điều khiển có thể bị giảm khi phản ứng với các nhiễu trong hệ thống.
Độ trượt (Drop)
Trong trường hợp không có nhiễu, điều khiển tỉ lệ thuần túy không thể đạt giá trị mong muốn, nhưng sẽ duy trì một mức sai số ổn định gọi là (độ trượt), phụ thuộc vào độ lợi tỉ lệ và độ lợi quá trình. Đặc biệt, nếu độ lợi quá trình giảm dần theo thời gian do thiếu điều khiển, chẳng hạn như khi làm mát lò nung về nhiệt độ phòng-được ký hiệu là G và giả định sai số gần như hằng số, thì độ trượt xảy ra khi độ lợi không đổi bằng thừa số tỉ lệ của đầu ra, với sai số là tuyến tính, do đó Khi thừa số tỉ lệ được điều chỉnh để đạt giá trị mong muốn, sẽ có sự sai lệch do độ lợi quá trình, khiến hệ thống không đạt được giá trị đặt. Nếu độ lợi quá trình giảm khi làm mát, trạng thái dừng sẽ thấp hơn điểm đặt, hiện tượng này gọi là 'độ trượt'.
Chỉ các thành phần dịch chuyển (như trung bình dài hạn) của độ lợi quá trình mới ảnh hưởng đến độ trượt, trong khi các dao động ngẫu nhiên hoặc đều trên hoặc dưới thành phần dịch chuyển sẽ bị loại bỏ. Độ lợi quá trình có thể thay đổi theo thời gian hoặc do các yếu tố bên ngoài, ví dụ như khi nhiệt độ phòng thay đổi, tốc độ làm mát cũng sẽ thay đổi.
Độ trượt tỉ lệ thuận với độ lợi quá trình và nghịch với độ lợi tỉ lệ, là một hạn chế không thể tránh khỏi trong điều khiển tỉ lệ thuần túy. Để giảm thiểu độ trượt, có thể thêm một thừa số độ lệch (điều chỉnh điểm đặt so với giá trị thực tế) hoặc sử dụng một khâu tích phân (trong bộ điều khiển PI hoặc PID), giúp tính toán và điều chỉnh độ lệch một cách hiệu quả.
Mặc dù có hiện tượng độ trượt, cả lý thuyết điều chỉnh và thực tiễn công nghiệp đều khẳng định rằng khâu tỉ lệ vẫn là một yếu tố quan trọng trong quá trình điều khiển.
Khâu tích phân
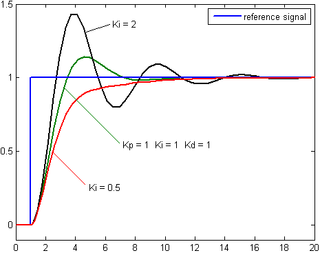
Khâu tích phân (còn được gọi là reset) có phân phối tỷ lệ thuận với cả độ lớn của sai số và thời gian xảy ra sai số. Tổng sai số tích lũy theo thời gian (tích phân sai số) cung cấp sự điều chỉnh bù đã được hiệu chỉnh trước đó. Độ tích lũy sai số sau đó được nhân với độ lợi tích phân và cộng vào tín hiệu đầu ra của bộ điều khiển. Biên độ phân phối của khâu tích phân trong tất cả các tác động điều chỉnh được xác định bởi độ lợi tích phân, .
Thừa số tích phân được xác định bởi:
trong đó
- : hệ số tích phân của đầu ra
- : độ lợi tích phân, một tham số điều chỉnh
- : sai số
- : thời gian hoặc thời điểm hiện tại
- : biến tích phân trung gian
Khâu tích phân (khi kết hợp với khâu tỷ lệ) giúp tăng tốc quá trình đạt đến giá trị đặt và giảm thiểu sai số ổn định với tỷ lệ chỉ phụ thuộc vào bộ điều khiển. Tuy nhiên, vì khâu tích phân dựa vào sai số tích lũy từ trước, nó có thể gây ra hiện tượng quá điều chỉnh, làm giá trị hiện tại vượt qua giá trị đặt (vượt qua điểm đặt và tạo ra độ lệch). Để tìm hiểu thêm về cách điều chỉnh độ lợi tích phân và ổn định của bộ điều khiển, xem phần điều chỉnh vòng lặp.
Khâu đạo hàm
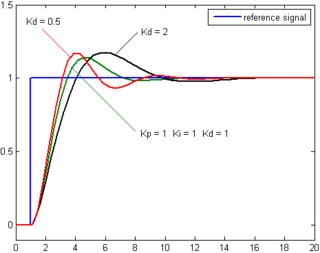
Tốc độ thay đổi của sai số quá trình được xác định bằng cách tính đạo hàm bậc một của sai số theo thời gian và nhân kết quả này với độ lợi tỉ lệ . Biên độ của phân phối khâu vi phân (còn gọi là tốc độ) trong tất cả các hành vi điều khiển bị giới hạn bởi độ lợi vi phân, .
Thừa số vi phân được tính theo công thức sau:
trong đó
- : thừa số vi phân của đầu ra
- : Độ lợi vi phân, một tham số điều chỉnh
- : Sai số
- : thời gian hoặc thời điểm hiện tại
Khâu vi phân làm giảm tốc độ thay đổi của đầu ra bộ điều khiển và đặc tính này rất quan trọng để đạt được điểm đặt của bộ điều khiển. Do đó, khâu vi phân được áp dụng để giảm biên độ vọt lố do thành phần tích phân gây ra và cải thiện độ ổn định của bộ điều khiển hỗn hợp. Tuy nhiên, việc vi phân một tín hiệu có thể khuếch đại nhiễu, khiến khâu này trở nên nhạy cảm hơn với nhiễu trong sai số, và có thể làm quá trình điều khiển trở nên không ổn định nếu nhiễu và độ lợi vi phân quá cao. Do vậy, một phiên bản của bộ vi sai với băng thông giới hạn thường được sử dụng, chẳng hạn như mạch bù sớm pha.
Tóm lược
Khâu tỉ lệ, tích phân và vi phân được kết hợp để tính toán đầu ra của bộ điều khiển PID. Nếu định nghĩa là đầu ra của bộ điều khiển, thì biểu thức cuối cùng của thuật toán PID sẽ là:
Trong đó, các tham số điều chỉnh bao gồm:
- Độ lợi tỉ lệ,
- giá trị càng cao, hệ thống phản ứng càng nhanh nhưng có thể gây ra sai số lớn hơn và cần điều chỉnh khâu tỉ lệ nhiều hơn. Nếu độ lợi tỉ lệ quá cao, có thể dẫn đến tình trạng mất ổn định và dao động không mong muốn.
- Độ lợi tích phân,
- giá trị càng cao giúp giảm nhanh sai số ổn định nhưng có thể dẫn đến hiện tượng vọt lố lớn hơn: sai số âm trong đáp ứng quá độ cần được bù đắp bởi sai số dương để hệ thống ổn định nhanh hơn.
- Độ lợi vi phân,
- giá trị cao giúp giảm độ vọt lố, nhưng có thể làm chậm tốc độ đáp ứng và gây ra mất ổn định do khuếch đại nhiễu trong tín hiệu vi phân.
Điều chỉnh vòng điều khiển
Điều chỉnh một vòng điều khiển là quá trình tối ưu hóa các tham số điều khiển của nó (độ lợi/dải tỉ lệ, độ lợi tích phân/reset, độ lợi vi phân/tốc độ) để đạt được hiệu suất điều khiển tốt nhất. Yêu cầu cơ bản là phải đảm bảo sự ổn định (không dao động). Tuy nhiên, các hệ thống khác nhau và ứng dụng khác nhau có yêu cầu khác nhau, đôi khi mâu thuẫn với nhau. Một số quá trình phi tuyến khiến các tham số hiệu quả trong điều kiện tải cao có thể không hoạt động hiệu quả khi khởi động từ không tải; điều này có thể được khắc phục bằng cách sử dụng các chương trình độ lợi khác nhau cho các điều kiện hoạt động khác nhau. Các bộ điều khiển PID thường cung cấp điều khiển chấp nhận được mà không cần điều chỉnh, nhưng kết quả có thể cải thiện đáng kể khi được điều chỉnh chính xác.
Điều chỉnh PID là một nhiệm vụ phức tạp, dù chỉ có 3 tham số cơ bản và lý thuyết điều chỉnh đơn giản, bởi vì nó phải đáp ứng các tiêu chuẩn phức tạp được đề cập trong Những hạn chế của điều khiển PID. Vì vậy, có nhiều phương pháp khác nhau để điều chỉnh vòng điều khiển, và các kỹ thuật phức tạp hơn đã trở thành chủ đề của nhiều phát minh sáng chế; phần này mô tả một số phương pháp điều chỉnh truyền thống và đơn giản hơn.
Độ ổn định
Khi các tham số của bộ điều khiển PID (độ lợi khâu tỉ lệ, tích phân và vi phân) được cấu hình không chính xác, quá trình điều khiển có thể trở nên không ổn định, với các biến động đầu ra có thể xảy ra hoặc không, và được giới hạn chỉ bởi hiện tượng bảo hòa hoặc sự cố cơ khí. Tình trạng không ổn định thường xuất hiện do sự dư thừa trong độ lợi, đặc biệt là khi có độ trễ lớn.
Thông thường, sự ổn định của đáp ứng (không giống như sự bất định) phải được đảm bảo và quá trình không nên dao động dưới bất kỳ điều kiện kết hợp nào của quá trình và điểm đặt. Tuy nhiên, trong một số trường hợp, sự ổn định biên có thể được chấp nhận hoặc cần thiết.
Tối ưu hóa hành vi
Tối ưu hóa hành vi của quá trình khi thay đổi hoặc điều chỉnh điểm đặt có thể thay đổi tùy theo ứng dụng cụ thể.
Hai yêu cầu chính là ổn định (loại bỏ nhiễu và duy trì ổn định tại điểm đặt đã định) và tự hiệu chỉnh lệnh (thực hiện các thay đổi điểm đặt). Những yêu cầu này phụ thuộc vào khả năng của các biến điều khiển để theo dõi chính xác giá trị mong muốn. Các tiêu chuẩn đặc biệt cho tự hiệu chỉnh lệnh bao gồm thời gian khởi động và thời gian ổn định. Một số quá trình cần hạn chế việc biến động quá mức của các biến quá trình so với điểm đặt để đảm bảo an toàn, trong khi các quá trình khác cần tối thiểu hóa năng lượng tiêu tốn khi chuyển đến một điểm đặt mới.
Tổng quan các phương pháp
Có nhiều cách khác nhau để tinh chỉnh vòng lặp PID. Những phương pháp hiệu quả nhất thường bao gồm việc sử dụng các mô hình xử lý khác nhau để xác định các tham số P, I và D dựa trên các đặc tính của mô hình động học. Phương pháp điều chỉnh thủ công thường không hiệu quả lắm, đặc biệt khi vòng lặp có thời gian đáp ứng tính bằng phút hoặc lâu hơn.
Việc chọn phương pháp điều chỉnh phù hợp chủ yếu phụ thuộc vào việc vòng lặp có thể được điều chỉnh 'offline' hay không, cũng như thời gian đáp ứng của hệ thống. Nếu hệ thống cho phép thực hiện offline, phương pháp điều chỉnh hiệu quả thường bao gồm việc thay đổi đầu vào từng bước, đo lường đầu ra theo thời gian, và sử dụng dữ liệu này để xác định các thông số điều khiển.
| Phương pháp | Ưu điểm | Khuyết điểm |
|---|---|---|
| Điều chỉnh thủ công | Không cần hiểu biết về toán. Phương pháp online. | Yêu cầu nhân viên có kinh nghiệm. |
| Ziegler–Nichols | Phương pháp chứng minh. Phương pháp online. | làm rối loạn quá trình, một số thử nghiệm và lỗi, phải điều chỉnh nhiều lần |
| Các công cụ phần mềm | Điều chỉnh chắc chắn. Phương pháp online hoặc offline. Có thể bao gồm phân tích các van và cảm biến. Cho phép mô phỏng trước khi tải xuống để thực thi. | Giá cả cao, và phải huấn luyện. |
| Cohen-Coon | xử lý các mô hình tốt. | Yêu cầu kiến thức toán học. Phương pháp offline. Chỉ tốt đối với các quá trình bậc một. |
Điều chỉnh thủ công
Nếu hệ thống phải duy trì trạng thái online, một cách điều chỉnh là thiết lập các giá trị ban đầu của và bằng không. Tăng dần giá trị cho đến khi vòng điều khiển bắt đầu dao động, sau đó giảm giá trị xuống khoảng một nửa giá trị đó để đạt được đáp ứng '1/4 giá trị suy giảm biên độ'. Tiếp theo, tăng giá trị cho đến khi thời gian xử lý đủ tốt. Tuy nhiên, nếu giá trị quá cao, có thể dẫn đến mất ổn định. Cuối cùng, nếu cần, tăng giá trị cho đến khi vòng điều khiển có thể nhanh chóng hồi phục về giá trị đặt sau khi bị nhiễu. Tuy nhiên, nếu giá trị quá cao, có thể gây ra đáp ứng dư và vọt lố. Điều chỉnh nhanh chóng của vòng điều khiển PID thường hơi quá mức khi đạt đến điểm đặt nhanh chóng; tuy nhiên, một số hệ thống không chấp nhận vọt lố, trong trường hợp đó, cần thiết phải có một hệ thống vòng kín giảm lố, với giá trị nhỏ hơn một nửa giá trị để hạn chế dao động.
| Thông số | Thời gian khởi động | Quá độ | Thời gian xác lập | Sai số ổn định | Độ ổn định |
|---|---|---|---|---|---|
| Giảm | Tăng | Thay đổi nhỏ | Giảm | Giảm cấp | |
| Giảm | Tăng | Tăng | Giảm đáng kể | Giảm cấp | |
| Giảm ít | Giảm ít | Giảm ít | Về lý thuyết không tác động | Cải thiện nếu nhỏ |
Phương pháp Ziegler–Nichols
Một trong những kỹ thuật điều chỉnh kinh nghiệm là phương pháp Ziegler–Nichols, được phát triển bởi John G. Ziegler và Nathaniel B. Nichols vào thập niên 1940. Tương tự như các phương pháp trước, độ lợi và được thiết lập ban đầu là không. Độ lợi P sẽ được điều chỉnh tăng dần cho đến khi nó đạt tới giá trị giới hạn, , làm cho đầu ra của vòng điều khiển bắt đầu dao động. Giá trị và khoảng thời gian dao động được sử dụng để tính toán các giá trị điều chỉnh.
| Dạng điều khiển | |||
|---|---|---|---|
| P | - | - | |
| PI | - | ||
| PID |
Phần mềm điều chỉnh PID
Ngày nay, hầu hết các ứng dụng công nghiệp hiện đại không còn sử dụng phương pháp điều chỉnh vòng lặp theo cách thủ công nữa. Thay vào đó, phần mềm điều chỉnh PID và tối ưu hóa vòng lặp được áp dụng để đảm bảo kết quả chính xác. Các phần mềm này có khả năng thu thập dữ liệu, xây dựng các mô hình xử lý và đưa ra các phương pháp điều chỉnh tối ưu. Một số gói phần mềm còn có thể cải thiện quá trình điều chỉnh bằng cách thu thập dữ liệu từ các điều chỉnh tham khảo.
Việc điều chỉnh PID bằng phương pháp toán học sẽ tạo ra một tín hiệu trong hệ thống, sau đó sử dụng phản ứng tần số của hệ thống điều khiển để xác định các giá trị điều chỉnh của vòng PID. Đối với những vòng lặp có thời gian đáp ứng kéo dài vài phút, điều chỉnh bằng toán học là lựa chọn tối ưu, vì thử nghiệm thực tế có thể mất nhiều ngày để tìm ra điểm ổn định. Giá trị tối ưu có thể khó đạt được hơn. Một số bộ điều khiển số còn có chức năng tự điều chỉnh, cho phép điều chỉnh tối ưu thông qua việc gửi những thay đổi nhỏ của điểm đặt đến hệ thống.
Các phương pháp điều chỉnh khác nhau có thể được áp dụng tùy thuộc vào tiêu chuẩn đánh giá kết quả. Hiện nay, nhiều công nghệ tiên tiến đã được tích hợp vào các module phần mềm và phần cứng để tối ưu hóa việc điều chỉnh PID.
Các cải tiến cho thuật toán PID
Thuật toán PID cơ bản gặp một số thách thức trong các ứng dụng điều khiển, và những vấn đề này đã được cải thiện nhờ các chỉnh sửa nhỏ trong công thức của PID.
- Tích phân khởi động
Một vấn đề thường gặp ở bộ PID lý tưởng là tình trạng Tích phân khởi động, trong đó khi có sự thay đổi lớn ở điểm đặt (tức là thay đổi tăng), khâu tích phân có thể tích lũy một sai số đáng kể trong giai đoạn khởi động, dẫn đến việc sai số tích lũy tăng cao và không ngừng. Vấn đề này có thể được khắc phục bằng cách:
- Thiết lập giá trị tích phân ban đầu cho bộ điều khiển theo mức độ mong muốn
- Tăng điểm đặt với tốc độ phù hợp
- Chưa cho phép chức năng tích phân hoạt động cho đến khi PV nằm trong vùng điều khiển
- Xác định thời gian tối đa cho phép sai số tích phân vượt quá giới hạn
- Ngăn không cho khâu tích phân tích lũy sai số ngoài hoặc dưới ngưỡng quy định
- Ngăn chặn chức năng tích phân trong trường hợp bị nhiễu
- Khi một vòng PID điều khiển nhiệt độ của lò nung điện trở, nếu hệ thống đã ổn định và sau đó cửa lò mở, khiến nhiệt độ thấp tràn vào lò nung và giảm nhiệt độ dưới mức cài đặt, chức năng tích phân có xu hướng điều chỉnh sai số này bằng cách tạo ra một sai số dương. Để tránh điều này, có thể 'đóng băng' chức năng tích phân sau khi mở cửa lò, để vòng điều khiển có đủ thời gian làm nóng lại lò nung.
- Thay thế chức năng tích phân bằng một phần dựa trên mô hình
- Thời gian đáp ứng của hệ thống thường được biết trước. Vì vậy, việc mô phỏng thời gian đáp ứng này bằng một mô hình và tính toán các tham số chưa biết từ phản ứng thực tế của hệ thống là rất tiện lợi. Ví dụ, nếu hệ thống là lò nung điện, phản ứng giữa nhiệt độ lò và nhiệt độ môi trường đối với sự thay đổi công suất điện có thể được mô phỏng bằng bộ lọc thông thấp RC đơn giản nhân với hệ số chưa biết. Công suất điện cung cấp cho lò nung được làm trễ bởi bộ lọc thông thấp để mô phỏng đáp ứng nhiệt độ lò nung, sau đó nhiệt độ thực trừ nhiệt độ môi trường được chia cho thành phần điện năng thông thấp này. Kết quả này sau đó được ổn định bằng một bộ lọc thông thấp khác để xác định hệ số tỉ lệ. Tính toán này giúp xác định lượng điện cần thiết bằng cách lấy điểm đặt nhiệt độ trừ nhiệt độ môi trường và nhân với hệ số này. Kết quả này có thể thay thế chức năng tích phân, giúp đạt được sai số điều khiển gần như '0' trong chế độ ổn định và cải thiện đáng kể hiệu quả điều khiển so với bộ điều khiển PID tối ưu. Bộ điều khiển dạng này hoạt động chính xác trong vòng hở, tạo ra tích phân khởi động với hàm tích phân. Đây là một lợi thế khi nhiệt cấp cho lò nung giảm đột ngột do sự cố bộ nung, hoặc khi bộ điều khiển được dùng như hệ thống tham vấn và không thể đưa về chế độ vòng kín. Nó cũng hiệu quả nếu bộ điều khiển là một nhánh của hệ thống điều khiển phức tạp và có thể tạm thời không hoạt động.
Nhiều vòng điều khiển PID được áp dụng cho thiết bị cơ khí như van. Bảo trì cơ khí có thể dẫn đến chi phí và hao mòn, ảnh hưởng đến hiệu suất điều khiển do ma sát tĩnh hoặc dãi chết trong phản ứng cơ khí đối với tín hiệu đầu vào. Tốc độ hao mòn phụ thuộc vào việc sử dụng thiết bị thường xuyên. Ở những nơi có hao mòn đáng chú ý, vòng điều khiển PID có thể áp dụng dãi chết ở đầu ra để giảm tần suất hoạt động của van. Điều này có thể thực hiện bằng cách điều chỉnh bộ điều khiển để duy trì ổn định ở đầu ra nếu thay đổi nhỏ (trong dãi chết xác định). Tín hiệu đầu ra tính toán cần loại bỏ dãi chết trước khi thực sự thay đổi đầu ra.
Khâu tỉ lệ và khâu vi phân có thể gây ra biến động dư thừa ở đầu ra khi hệ thống phản ứng với các thay đổi đột ngột trong sai số, như sự thay đổi lớn của điểm đặt. Đặc biệt, khâu vi phân có thể tạo ra biến động lớn khi đạo hàm sai số, đặc biệt là với các thay đổi đột ngột. Do đó, một số thuật toán PID đã được bổ sung các cải tiến sau đây:
- Đạo hàm đầu ra
- Trong trường hợp bộ điều khiển PID đo đạo hàm của đại lượng đầu ra thay vì sai số, tín hiệu đầu ra sẽ luôn liên tục vì không có bước nhảy. Để đạt hiệu quả, đạo hàm của đầu ra cần phải tương đương với đạo hàm của sai số.
- Dốc hóa điểm đặt
- Cải tiến này cho phép điểm đặt tăng dần từ giá trị hiện tại đến giá trị mục tiêu mới bằng cách sử dụng hàm tuyến tính hoặc đạo hàm bậc nhất của hàm dốc, giúp tránh sự gián đoạn do thay đổi đột ngột.
- Trọng hóa điểm đặt
- Trọng hóa điểm đặt áp dụng các hệ số khác nhau để nhân với sai số, tùy thuộc vào các yếu tố của bộ điều khiển. Sai số trong khâu tích phân cần phải là sai số thực để tránh sai số điều khiển trong trạng thái ổn định. Điều này ảnh hưởng đến đáp ứng của điểm đặt, nhưng không tác động đến phản ứng của nhiễu tải và nhiễu đo lường.
Lịch sử

Các bộ điều khiển PID trong thiết kế bộ điều tốc đã xuất hiện từ những năm 1890 và sau đó được áp dụng trong hệ thống lái tàu tự động. Một trong những ví dụ sớm nhất của bộ điều khiển PID được Elmer Sperry phát triển vào năm 1911. Tác phẩm phân tích lý thuyết đầu tiên về bộ điều khiển PID được kỹ sư người Mỹ gốc Nga Nicolas Minorsky công bố vào năm (Minorsky 1922). Minorsky đã thiết kế hệ thống lái tàu tự động cho Hải quân Mỹ, và thông qua quan sát, ông nhận thấy rằng người lái tàu không chỉ dựa vào sai số hiện tại mà còn dựa vào sai số trong quá khứ và tốc độ thay đổi hiện tại, sau đó đã được ông toán học hóa. Tuy nhiên, Hải quân Mỹ cuối cùng đã không chấp nhận hệ thống này do sự phản đối từ nhân viên. Nghiên cứu tương tự cũng được nhiều người khác thực hiện và công bố vào thập niên 1930.
Những bộ điều khiển đầu tiên chủ yếu là khí nén, thủy lực hoặc cơ khí, trong khi hệ thống điện phát triển sau Chiến tranh Thế giới thứ II.
Công trình của Minorsky

Công trình của Minorsky chủ yếu tập trung vào việc giải quyết các vấn đề liên quan đến độ ổn định thay vì điều khiển tổng quát. Mặc dù khâu điều khiển tỉ lệ cung cấp sự ổn định cho các biến động nhỏ, nó không đủ để xử lý các nhiễu lớn, đặc biệt là do gió mạnh (do droop gây ra). Do đó, khâu tích phân được thêm vào để cải thiện. Cuối cùng, khâu vi phân được bổ sung để nâng cao hiệu quả điều khiển. Các thử nghiệm được thực hiện trên tàu USS New Mexico, với bộ điều khiển điều chỉnh vận tốc gốc của bánh lái. Điều khiển PI tạo ra độ lệch liên tục trong khoảng ±2°, trong khi thêm khâu D giúp giảm độ nghiêng xuống còn ±1/6°, tốt hơn nhiều so với khả năng của người lái tàu.
Các hạn chế của điều khiển PID
Mặc dù bộ điều khiển PID có thể giải quyết nhiều bài toán điều khiển và thường đạt kết quả tốt mà không cần cải tiến hay điều chỉnh, chúng vẫn có thể gặp hạn chế trong một số ứng dụng và không luôn mang lại điều khiển tối ưu. Vấn đề cơ bản của PID là hệ thống phản hồi với các tham số không đổi, không cung cấp thông tin trực tiếp về quá trình. Vì vậy, kết quả điều khiển thường là sự phản ứng và thỏa hiệp. Mặc dù PID là một bộ điều khiển tốt mà không cần mô hình, kết quả tốt hơn có thể đạt được khi kết hợp với mô hình điều khiển.
Một cải tiến quan trọng là kết hợp điều khiển nuôi-tiến với hiểu biết về hệ thống, sử dụng PID chỉ để điều khiển sai số. PID có thể được tối ưu hóa theo nhiều cách, chẳng hạn như điều chỉnh các thông số (hoặc lập trình độ lợi cho các ứng dụng khác nhau hoặc cải tiến thích nghi dựa trên kết quả), cải thiện đo lường (như tăng tốc độ lấy mẫu, độ chính xác, và sử dụng lọc thông thấp khi cần) hoặc kết nối nhiều bộ điều khiển PID với nhau.
Khi sử dụng độc lập, các bộ điều khiển PID có thể cho kết quả kém khi độ lợi vòng PID bị giảm, dẫn đến hiện tượng vọt lố, dao động hoặc rung quanh giá trị điểm đặt. Chúng cũng gặp khó khăn trong các tình huống phi tuyến, có thể cân bằng điều tiết với thời gian đáp ứng, không phản ứng nhanh với sự thay đổi hành vi điều khiển (do đó quá trình có thể chậm thay đổi sau khi khởi động), và có thể bị trễ trong việc đáp ứng các nhiễu lớn.
Tuyến tính
Một vấn đề với các bộ điều khiển PID là tính chất tuyến tính và sự đối xứng từng phần của chúng. Do đó, hiệu quả của PID trong các hệ thống phi tuyến (như điều khiển HVAC) có thể khác nhau. Ví dụ, trong điều khiển nhiệt độ, một trường hợp phổ biến là làm nóng chủ động (qua bộ nung) nhưng làm lạnh bị động (ngừng làm nóng mà không làm lạnh), dẫn đến việc loại bỏ quá độ chỉ có thể thực hiện một cách từ từ, không thể ép nhanh chóng. Trong tình huống này, bộ điều khiển PID có thể được điều chỉnh để giảm vọt lố, nhằm ngăn ngừa hoặc giảm sự vọt lố, mặc dù điều này có thể làm giảm hiệu suất (tăng thời gian xác lập).
Nhiễu trong khâu vi phân
Một vấn đề với khâu Vi phân là ngay cả những biến đổi nhỏ trong đại lượng đo lường hoặc nhiễu có thể dẫn đến sự thay đổi lớn ở đầu ra. Để giảm thiểu tác động của nhiễu sóng hài bậc cao, thường cần sử dụng bộ lọc thông thấp. Tuy nhiên, việc kết hợp lọc thông thấp với điều khiển vi phân có thể gây ra xung đột, do đó, việc giảm nhiễu bằng các linh kiện khác là một lựa chọn tốt hơn. Bộ lọc trung vị phi tuyến có thể cải thiện hiệu suất lọc và kết quả thực tế. Trong một số hệ thống, khâu vi phân có thể bị 'tắt' với một chút suy giảm điều khiển, làm cho bộ điều khiển PID hoạt động giống như bộ điều khiển PI.
Các cải tiến
Nuôi tiến
Để nâng cao hiệu quả điều khiển, có thể kết hợp điều khiển phản hồi (vòng kín) của bộ điều khiển PID với điều khiển nuôi tiến (vòng hở). Thông tin về hệ thống (như gia tốc và quán tính mong muốn) có thể được cung cấp trước và kết nối với đầu ra của PID để cải thiện kết quả hệ thống tổng thể. Giá trị nuôi tiến một mình thường chiếm phần lớn đầu ra điều khiển. Bộ điều khiển PID có thể được dùng chính để điều chỉnh sự khác biệt hoặc sai số giữa điểm đặt (SP) và giá trị thực của biến quá trình (PV). Vì đầu ra nuôi tiến không bị ảnh hưởng bởi tín hiệu phản hồi, nó không làm cho hệ thống dao động, từ đó cải thiện đáp ứng và độ ổn định của hệ thống.
Ví dụ, trong nhiều hệ thống điều khiển chuyển động, để tăng tốc một tải cơ khí, cần phải gia tăng lực hoặc mô-men từ nguồn động lực chính, như động cơ hoặc bộ truyền động. Nếu bộ điều khiển PID điều khiển vận tốc được sử dụng cho việc điều khiển tốc độ của tải và lực cùng mô-men trong nguồn động lực chính, thì cũng sẽ có lợi khi điều khiển gia tốc tức thời theo yêu cầu của tải, tỷ lệ, và kết hợp nó với đầu ra của bộ điều khiển PID tốc độ. Điều này có nghĩa là bất cứ khi nào tải được tăng tốc hoặc giảm tốc, một lực tương ứng từ nguồn động lực chính sẽ được yêu cầu mà không cần quan tâm đến giá trị phản hồi. Vòng điều khiển PID sẽ sử dụng thông tin phản hồi để điều chỉnh hỗn hợp đầu ra, giảm hiệu số giữa điểm đặt và giá trị phản hồi. Kết hợp bộ điều khiển nuôi tiến vòng hở và bộ điều khiển PID vòng kín tạo ra một hệ thống điều khiển nhạy bén, ổn định và đáng tin cậy hơn.
Các cải tiến khác
Ngoài phương pháp nuôi tiến, bộ điều khiển PID có thể được cải thiện thêm bằng các kỹ thuật khác như lập trình điều chỉnh độ lợi PID (thay đổi các thông số tùy theo điều kiện làm việc), logic mờ, hoặc các phương pháp động từ máy tính. Các ứng dụng thực tế có thể được nâng cao bằng cách kết nối thêm thiết bị với bộ điều khiển. Để đạt được kết quả điều khiển tốt, cần có tốc độ lấy mẫu cao và đo lường chính xác.
Điều khiển ghép tầng
Một điểm nổi bật của bộ điều khiển PID là khả năng kết hợp hai bộ điều khiển PID để đạt hiệu quả động học tốt hơn, được gọi là điều khiển PID ghép tầng. Trong phương pháp này, hai bộ PID được liên kết với nhau, trong đó một bộ PID điều khiển điểm đặt cho bộ còn lại. Một bộ điều khiển sẽ hoạt động như bộ điều khiển vòng ngoài, điều chỉnh các thông số chính như mức chất lỏng hoặc vận tốc. Bộ điều khiển còn lại hoạt động như bộ điều khiển vòng trong, đọc đầu ra của bộ điều khiển vòng ngoài như điểm đặt, thường dùng để điều khiển các thông số nhanh hơn như tốc độ chảy hoặc gia tốc. Việc sử dụng bộ điều khiển PID ghép tầng cho phép tăng tần số hoạt động và giảm hằng số thời gian của đối tượng điều khiển.
Thực thi vật lý của điều khiển PID
Trong giai đoạn đầu của điều khiển quá trình tự động, bộ điều khiển PID đã được triển khai bằng các thiết bị cơ khí. Những bộ điều khiển này sử dụng các thành phần như đòn bẩy, lò xo và khối chất, thường được kích thích bằng khí nén. Các bộ điều khiển khí nén này từng là tiêu chuẩn công nghiệp.
Các bộ điều khiển điện tử tương tự có thể được chế tạo từ bộ khuếch đại ống chân không hoặc từ transistor bán dẫn, kết hợp với tụ điện và điện trở. Những hệ thống PID điện tử tương tự thường thấy trong các ứng dụng điện tử phức tạp như định vị đầu từ của ổ đĩa, điều hòa công suất của bộ nguồn, hoặc trong mạch phát hiện chuyển động của máy đo địa chấn hiện đại. Hiện nay, các bộ điều khiển điện tử chủ yếu đã được thay thế bởi các bộ điều khiển kỹ thuật số sử dụng vi điều khiển hoặc FPGA.
Trong ngành công nghiệp hiện đại, các bộ điều khiển PID thường được triển khai trong các bộ điều khiển logic khả lập trình (PLC) hoặc các bộ điều khiển kỹ thuật số gắn cố định trên bảng mạch. Phần mềm điều khiển có ưu điểm là chi phí thấp và tính linh hoạt cao trong việc thực thi thuật toán PID.
Điện áp có thể được điều chỉnh thông qua phân phối thời gian của độ rộng xung (PWM) - một chu kỳ thời gian cố định, và các điều chỉnh đạt được bằng cách thay đổi phân phối thời gian trong chu kỳ này khi đầu ra của bộ điều khiển là +1 (hoặc -1) thay vì 0. Trong hệ thống kỹ thuật số, các phân bố có thể là rời rạc - ví dụ, tăng 0.1 giây trong vòng một chu kỳ 2 giây để đạt 20 bước: tỉ lệ tăng là 5% - do đó có sai số rời rạc, cần đủ độ phân giải thời gian để đạt kết quả mong muốn.
Ký hiệu thay thế và các dạng PID
Dạng PID lý tưởng và chuẩn mực
Bộ điều khiển PID là loại thiết bị phổ biến nhất trong công nghiệp, và dạng chuẩn của nó thường được áp dụng để điều chỉnh thuật toán. Trong dạng chuẩn này, hệ số được sử dụng trong khâu và , được thực hiện.
trong đó
- là thời gian tích phân
- là thời gian vi phân
Trong mô hình PID dạng song song lý tưởng, được trình bày trong lý thuyết điều khiển
Các tham số điều khiển được kết nối với dạng chuẩn qua và . Dạng song song, trong đó các tham số được xem như là các độ lợi đơn giản, là kiểu điều khiển tổng quát và linh hoạt nhất. Tuy nhiên, nó cũng là dạng có ít liên kết vật lý nhất và thường chỉ được dùng cho nghiên cứu lý thuyết về bộ điều khiển PID. Dạng chuẩn, dù có vẻ phức tạp hơn về mặt toán học, nhưng lại phổ biến hơn trong thực tế công nghiệp.
Dạng Laplace của bộ điều khiển PID
Đôi khi việc viết bộ điều khiển PID dưới dạng biến đổi Laplace lại rất tiện lợi:
Chúng ta đã có biểu diễn bộ điều khiển PID dưới dạng biến đổi Laplace cùng với hàm truyền của hệ điều khiển, giúp việc xác định hàm truyền vòng kín của hệ thống trở nên đơn giản hơn.
Dạng nối tiếp/tương hỗ
Một cách biểu diễn khác của bộ điều khiển PID là dạng nối tiếp, còn gọi là dạng tương hỗ
Trong đó, các tham số liên quan đến các thông số của dạng chuẩn thông qua
- , , và
với
- .
Dạng này cơ bản là sự kết hợp của bộ điều khiển PD và PI nối tiếp với nhau, và giúp việc xây dựng các bộ điều khiển analog dễ hơn. Khi các bộ điều khiển được số hóa, dạng tương hỗ thường được kế thừa.
Thực hiện quá trình rời rạc hóa
Khi thiết kế một bộ điều khiển PID kỹ thuật số cho Vi điều khiển (MCU) hoặc FPGA, dạng chuẩn của bộ điều khiển PID cần phải được rời rạc hóa. Vi phân bậc một được tính bằng cách sử dụng sai phân hữu hạn lùi. Khâu tích phân cũng được rời rạc hóa, với thời gian lấy mẫu , như sau,
Khâu vi phân được tính theo công thức sau,
Vì vậy, một giải thuật tính toán vận tốc để triển khai bộ điều khiển PID rời rạc trên MCU có thể được xây dựng bằng cách đạo hàm , sử dụng các giá trị từ đạo hàm bậc một và bậc hai để tính , và kết quả cuối cùng là:
Mẫu mã chương trình
Dưới đây là một ví dụ về chương trình vòng lặp đơn giản để thực hiện thuật toán PID theo kiểu 'lý tưởng, song song':
error_trước = 0 integ = 0 start: error = setpoint - vị_trí_thực integ = integ + (error*dt) đạo_hàm = (error - error_trước)/dt đầu_ra = (Kp*error) + (Ki*integ) + (Kd*đạo_hàm) error_trước = error chờ(dt) quay_lại start