
Nhờ 'rút ra kinh nghiệm', robot mới của Viện MIT đã tự học chạy để không ngừng phá vỡ giới hạn tốc độ cá nhân tốt nhất của nó.
Chúng ta đã từng nghe về robot Sophia. 'Một chiếc máy thiên tài có khả năng phát triển theo thời gian, với trí thông minh không ngừng tăng lên...', như lời tuyên bố của nhà phát triển. Được thiết kế để đưa ra câu trả lời theo thời gian thực, Sophia đã gây ra nhiều tranh cãi và kinh hoàng khi đe dọa hủy diệt loài người. Thậm chí còn đòi quyền làm 'mẹ'. Nhiều người cho rằng Sophia là minh chứng cho sự phát triển mạnh mẽ của công nghệ, tạo ra trí thông minh nhân tạo vượt trội so với con người.

Robot Sophia
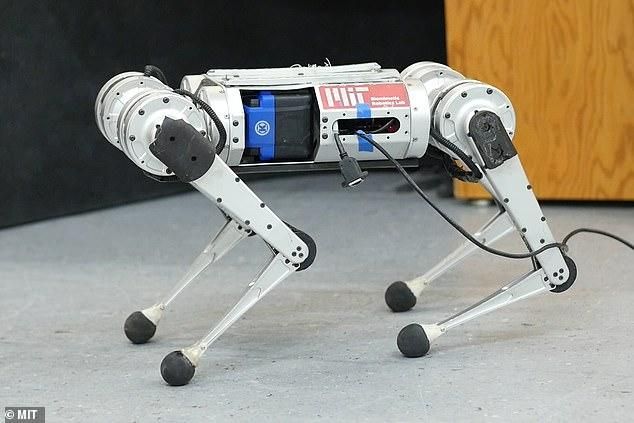
Tuy nhiên, Sophia và tất cả các robot khác đều hoạt động theo các lập trình của con người. Nhưng một sản phẩm mới từ viện MIT (Mỹ), mang tên Cheetah mini, dường như đã vượt lên trên điều đó. Nó học hỏi, rút kinh nghiệm để tự tìm ra cách chạy tốt nhất và thích nghi với mọi loại địa hình mà không cần sự phân tích từ con người.
Robot Cheetah mini là phiên bản cải tiến của Cheetah ra mắt năm 2012, có thể đạt tốc độ tối đa 45,5 km/h. Nhưng Cheetah mini với sự hỗ trợ của trí tuệ nhân tạo có thể trở nên nhanh nhẹn hơn nhờ khả năng tự học mà không cần thử nghiệm.
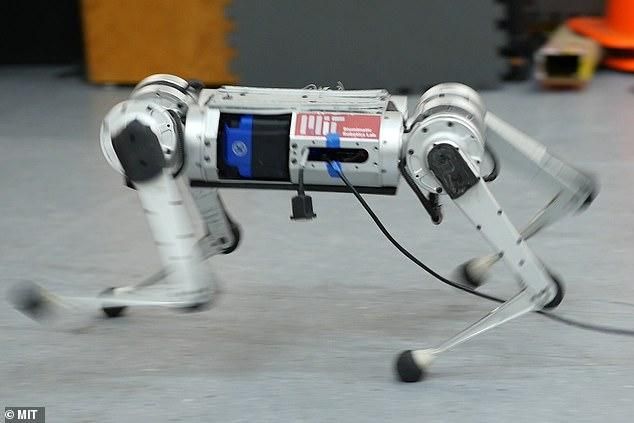
Chạy trên mọi địa hình với tốc độ cao, 'con báo robot' bốn chân này chắc chắn sẽ khiến bạn trầm trồ.
Trong một video mới được tiết lộ, chúng ta có thể thấy con robot bốn chân này va vào các rào cản và tự đứng dậy, vượt qua các chướng ngại vật, chạy với một chân không hoạt động và có khả năng thích ứng với các địa hình trơn trượt, băng giá cũng như những ngọn đồi đá. Khả năng thích ứng cao này của nó là nhờ vào một mạng lưới thần kinh đơn giản có thể đưa ra đánh giá về các tình huống trong thực tế.
Tiến bộ vượt bậc
Thường thì, cách di chuyển của robot được điều khiển bởi một hệ thống sử dụng dữ liệu từ phân tích cách các cơ chế cơ học chuyển động, từ đó tạo ra các mô hình hướng dẫn. Tuy nhiên, những mô hình này thường không hiệu quả và phù hợp vì không thể dự đoán mọi tình huống trong thực tế.
Khi robot chạy với tốc độ cao nhất, giới hạn phần cứng của nó làm cho việc xây dựng mô hình rất khó khăn, vì vậy chúng thường gặp khó khăn trong việc thích ứng nhanh chóng với các thay đổi đột ngột trong môi trường. Để khắc phục điều này, thay vì dựa vào các thiết kế phân tích sẵn, nhóm phát triển từ MIT đã lựa chọn cách xây dựng một robot có khả năng tự học thông qua việc rút kinh nghiệm.

Cụ thể, nó sẽ học, thử nghiệm và rút kinh nghiệm từ lỗi mà không cần sự can thiệp của con người. Nếu tích lũy đủ kinh nghiệm về các loại địa hình khác nhau, nó có thể tự điều chỉnh cách di chuyển để cải thiện hành vi của mình. Và trải nghiệm này thậm chí không cần phải diễn ra trong thực tế. Theo nhóm nghiên cứu, bằng cách sử dụng mô phỏng, Cheetah mini có thể tích lũy 100 ngày kinh nghiệm chỉ trong ba giờ khi đứng yên.
'Chúng tôi đã phát triển một phương pháp để cải thiện hành vi của robot thông qua trải nghiệm mô phỏng. Và phương pháp của chúng tôi cho phép triển khai thành công các hành vi đã học trong thực tế', nhóm nghiên cứu cho biết. 'Trong tất cả các môi trường mà nó nhìn thấy trong trình mô phỏng này, khi hoạt động trong thế giới thực, bộ điều khiển sẽ xác định và thực hiện các kỹ năng liên quan trong thời gian thực.'
Phá vỡ kỷ lục
Kỷ lục về tốc độ cao trước đó được thiết lập bởi phòng thí nghiệm robot mô phỏng sinh học tại MIT vào năm 2019, khi robot đạt được tốc độ chạy tối đa 3,7m/s. Nhưng robot Cheetah mini mới đã đạt tốc độ hơn 3,9m/s (tương đương 14,04 km/h).
'Một cách thiết thực hơn để chế tạo một con robot với nhiều kỹ năng đa dạng là nói cho con robot biết phải làm gì và để nó tự tìm cách thực hiện', nhóm nghiên cứu cho biết. 'Hệ thống của chúng tôi là một ví dụ về điều này. Trong phòng thí nghiệm, chúng tôi đã bắt đầu áp dụng mô hình này cho các hệ thống robot khác, bao gồm cả bàn tay có thể cầm và thao tác nhiều vật thể khác nhau.'

Các nhà nghiên cứu của MIT giải thích rằng khá khó khăn để lập trình cho một robot chạy trên địa hình hiểm trở.
Nhưng với một hệ thống như trên, họ khẳng định rằng có thể mở rộng quy mô công nghệ, điều mà các mô hình truyền thống không thể làm được.

Robot Cheetah mini (trái) và một con chó thật (phải).
Kết quả nghiên cứu này cũng như các nghiên cứu robot mô phỏng động vật khác sẽ mang lại lợi ích cho cả lĩnh vực sinh học và chế tạo robot. Ngoài việc mang lại kiến thức mới, nếu robot có thể thay thế động vật trong tương lai, chúng sẽ giúp nhiều nhà khoa học có cơ hội nghiên cứu cơ chế vận động của động vật trong các điều kiện thí nghiệm khác nhau. Việc xác định cấu trúc của robot gần giống với cấu trúc của động vật sẽ dẫn đến sự phát triển của các công nghệ cơ bản để chế tạo robot có khả năng di chuyển và cơ động hiệu quả như động vật.
Tham khảo New Atlas và MailOnline