
Sự dao động là hiện tượng cơ học khi một vật thể chuyển động xung quanh điểm cân bằng. Thuật ngữ này có nguồn gốc từ tiếng Latin vibrationem ('rung lắc, vung vẩy'). Dao động có thể là chu kỳ, như chuyển động của con lắc, hoặc ngẫu nhiên, như chuyển động của lốp xe trên đường đá.
Những dao động mong đợi: ví dụ, chuyển động của âm thoa, lưỡi gà trong nhạc cụ kèn sáo hoặc harmonica, điện thoại di động, hoặc hình nón của loa.
Tuy nhiên, nhiều khi dao động là không mong muốn, lãng phí năng lượng và gây ra âm thanh không mong muốn. Chẳng hạn, dao động của động cơ, động cơ điện, hoặc các thiết bị cơ khí thường gây khó chịu. Dao động này có thể do mất cân bằng trong các bộ phận quay, ma sát không đều, hoặc sự phân bố không đều của bánh răng. Thiết kế chính xác có thể giảm thiểu các dao động không mong muốn.
Nghiên cứu về âm thanh và dao động có mối liên hệ chặt chẽ. Âm thanh, hay sóng áp suất, được tạo ra bởi các cấu trúc dao động (như dây thanh âm); những sóng áp suất này cũng có thể gây dao động cho các cấu trúc khác (như màng nhĩ). Do đó, việc giảm tiếng ồn thường liên quan đến việc xử lý vấn đề dao động.
Các loại dao động
Dao động tự do xảy ra khi một hệ thống cơ học được kích thích bằng cách tác động đầu vào ban đầu và được phép dao động tự do. Ví dụ, kéo một đứa trẻ trên xích đu rồi thả nó, hoặc nhấn một cái nĩa để nghe tiếng kêu. Hệ thống dao động ở một hoặc nhiều tần số tự nhiên và dần dần tắt cho đến khi ngừng hẳn.
Dao động cưỡng bức xảy ra khi một sự thay đổi theo thời gian (tải trọng, dịch chuyển hoặc vận tốc) được áp dụng lên một hệ thống cơ học. Sự thay đổi này có thể là đầu vào định kỳ và ổn định, đầu vào tạm thời hoặc đầu vào ngẫu nhiên. Các đầu vào định kỳ có thể là điều hòa hoặc không điều hòa. Ví dụ bao gồm dao động của máy giặt do mất cân bằng, dao động do động cơ hoặc đường không đồng đều, hoặc dao động của một tòa nhà trong trận động đất. Đối với hệ thống tuyến tính, tần số của đáp ứng dao động ổn định do đầu vào định kỳ là điều hòa theo tần số của lực hoặc chuyển động được áp dụng, và cường độ phản ứng phụ thuộc vào đặc tính của hệ thống cơ học.
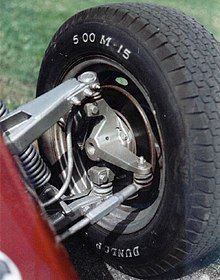
Dao động tắt dần: Khi năng lượng của một hệ thống dao động dần dần bị tiêu hao do ma sát và các yếu tố cản trở khác, các dao động được gọi là bị giảm chấn. Dao động tắt dần có thể thay đổi về tần số hoặc cường độ, hoặc dừng lại hoàn toàn, khiến hệ thống trở về trạng thái cân bằng. Ví dụ về loại dao động này là hệ thống treo của xe hơi được giảm chấn bởi bộ giảm xóc.
Thử nghiệm dao động
Thử nghiệm dao động được thực hiện bằng cách áp dụng tác động cưỡng bức lên một cấu trúc, thường thông qua các máy rung. Một cách khác là gắn DUT (thiết bị đang thử nghiệm) vào 'bàn' của máy rung. Mục đích của thử nghiệm là đánh giá phản ứng của DUT với môi trường dao động xác định. Các phản ứng đo được có thể bao gồm độ bền vòng đời, tần số cộng hưởng, hoặc âm thanh rít và ồn (NVH). Thử nghiệm squeak và rattle sử dụng máy rung yên tĩnh đặc biệt để tạo ra âm thanh rất thấp trong khi hoạt động.
Đối với tần số thấp, máy trộn thủy lực (hoặc điện thủy lực) thường được sử dụng. Đối với tần số cao hơn, máy lắc điện động được áp dụng. Thông thường, một hoặc nhiều điểm 'đầu vào' hoặc 'điều khiển' nằm trên DUT hoặc vật cố định được duy trì ở mức gia tốc được chỉ định. Các điểm 'đáp ứng' khác có thể trải qua mức rung tối đa (cộng hưởng) hoặc mức rung tối thiểu (chống cộng hưởng). Mục tiêu thường là đạt được chống cộng hưởng để giảm ồn hoặc giảm căng thẳng lên các bộ phận do chế độ rung gây ra bởi tần số rung cụ thể.
Các loại thử nghiệm dao động phổ biến nhất do phòng thí nghiệm kiểm tra dao động thực hiện là Sinusoidal và Ngẫu nhiên. Thử nghiệm sin (một tần số tại một thời điểm) được dùng để khảo sát phản ứng cấu trúc của thiết bị thử nghiệm (DUT). Thử nghiệm ngẫu nhiên (tất cả các tần số cùng một lúc) thường được sử dụng để mô phỏng môi trường thực tế hơn, chẳng hạn như đầu vào của ô tô di chuyển.
Hầu hết các thử nghiệm dao động được thực hiện chỉ trên một trục DUT tại một thời điểm, trong khi thực tế, dao động thường xảy ra trên nhiều trục cùng một lúc. MIL-STD-810G, phát hành vào cuối năm 2008, phương pháp thử nghiệm 527, yêu cầu kiểm tra với nhiều loại kích thích. Thiết bị thử rung dùng để gắn DUT vào bàn rung cần phải phù hợp với dải tần số của thử nghiệm. Đối với các thiết bị nhỏ hơn và tần số thấp hơn, thiết kế cố định không có tiếng vang trong dải tần số thử nghiệm là mục tiêu chính. Điều này trở nên khó khăn hơn khi DUT lớn hơn và tần số kiểm tra cao hơn. Trong các trường hợp này, các chiến lược kiểm soát đa điểm có thể giúp giảm thiểu cộng hưởng. Các thiết bị theo dõi hoặc ghi lại rung động đặc biệt được gọi là vibroscope.
Phân tích dao động
Phân tích dao động (VA) được áp dụng trong công nghiệp hoặc bảo trì nhằm giảm chi phí bảo trì và thời gian chết thiết bị bằng cách phát hiện lỗi. VA là phần quan trọng của chương trình Giám sát tình trạng (CM) và thường được gọi là Bảo trì dự đoán (PdM). Phổ biến nhất, VA được sử dụng để phát hiện lỗi trong thiết bị quay (như quạt, động cơ, máy bơm, hộp số) như mất cân bằng, lệch hướng, lỗi mang và cộng hưởng.
VA có thể sử dụng các đơn vị Displacement, Velocity và Acceleration thể hiện dưới dạng dạng sóng thời gian (TWF), nhưng phổ biến nhất là phổ từ một Fast Fourier Transform của TWF. Phổ rung cung cấp thông tin tần số quan trọng giúp xác định các thành phần lỗi.
Các nguyên tắc cơ bản của phân tích dao động có thể được hiểu qua mô hình van điều tiết lò xo đơn giản Mass-spring-damper. Thực tế, ngay cả một cấu trúc phức tạp như thân xe ô tô cũng có thể được mô phỏng như một 'tổng hợp' của các mô hình van-lò xo đơn giản. Mô hình khối lượng-lò xo-van điều tiết là ví dụ của dao động điều hòa đơn giản, và toán học mô tả hành vi của nó tương tự như các bộ dao động điều hòa đơn giản khác như mạch RLC.
Lưu ý: Bài viết này không đi sâu vào các dẫn xuất toán học chi tiết, mà chỉ tập trung vào các phương trình và khái niệm chính trong phân tích dao động. Để tìm hiểu các dẫn xuất cụ thể, vui lòng tham khảo tài liệu ở phần cuối bài viết.