
(NLĐO) - Phiên bản robot hình dáng con người có thể lơ lửng ở độ cao nửa mét, duy trì trạng thái cân bằng trên không nhờ hệ thống động cơ phản lực kết hợp trí tuệ nhân tạo xử lý tức thời.
Đây là thành quả đột phá từ Viện Công nghệ Italy (IIT) thông qua mẫu robot iRonCub3 - nguyên mẫu robot dạng người tiên phong sử dụng hệ thống tua-bin tạo lực đẩy. Cột mốc này mở ra hướng phát triển mới cho robot đa năng, đặc biệt hữu ích trong các tình huống cứu nạn và khắc phục thảm họa đòi hỏi công nghệ cao.
iRonCub3 sở hữu bộ 4 động cơ đẩy (2 ở cánh tay và 2 tại vị trí lưng) tạo lực đẩy vượt 1.000 newton, đủ nâng cơ thể robot 70kg. Khung xương titanium cùng lớp vỏ cách nhiệt giúp bảo vệ hệ thống khỏi luồng khí nóng lên tới 800°C trong quá trình hoạt động.

iRonCub3 - robot hình người đầu tiên bay bằng phản lực cất cánh thành công. Ảnh: Youtube Artificial and Mechanical Intelligence
Khác với drone có thiết kế đối xứng ổn định, robot dạng người với các khớp linh hoạt tạo ra các vấn đề phức tạp về khí động học và cân bằng trọng lực. Giải pháp từ nhóm IIT phối hợp với Trường Bách khoa Milan và Đại học Stanford là hệ thống điều khiển bay AI sử dụng mạng nơ-ron được đào tạo qua cả dữ liệu mô phỏng lẫn thực nghiệm, giúp iRonCub3 điều chỉnh tư thế, xử lý nhiễu khí động và khởi động động cơ theo trình tự khi cất cánh.
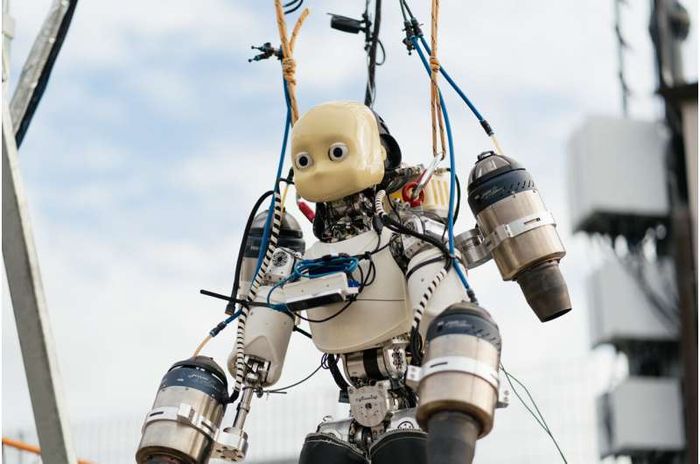
iRonCub3 tích hợp 4 động cơ phản lực, gồm 2 động cơ gắn trên cánh tay và hai động cơ ở sau lưng. Ảnh: IIT
Dự án phát triển robot này áp dụng phương pháp "thiết kế đồng bộ" (co-design), kết hợp tối ưu hóa hình dạng cơ thể và bố trí động cơ để đạt hiệu suất bay tối ưu. Các bài kiểm tra mô phỏng, kiểm soát nhiệt độ, cảm biến lực đẩy cùng thuật toán cất/hạ cánh đều được hiệu chỉnh tỉ mỉ.
Ông Daniele Pucci, Giám đốc Phòng thí nghiệm Trí tuệ cơ học và nhân tạo (AMI Lab) tại IIT cho biết, thiết kế này nhằm mở rộng phạm vi hoạt động của robot trong các môi trường khó khăn và không ổn định. iRonCub có tiềm năng ứng dụng trong cứu hộ thảm họa, thăm dò khu vực nguy hiểm và di chuyển tự động trong không gian hạn chế có cấu trúc phức tạp.
Trong giai đoạn tiếp theo, iRonCub3 sẽ được thử nghiệm thực địa tại sân bay Genoa, hướng tới mục tiêu ứng dụng công nghệ robot bay vào thực tế.