
Đây được xem là một cột mốc quan trọng trong nghiên cứu và phát triển robot hình người cho tương lai.
Các nhà khoa học từ Viện Công nghệ Shibaura, Đại học Waseda và Fujitsu đã phát triển một phương pháp mới, sử dụng máy tính lượng tử để giúp robot di chuyển mượt mà và hiệu quả hơn, đánh dấu một bước tiến vượt bậc trong việc tạo ra những robot có khả năng chuyển động giống con người.
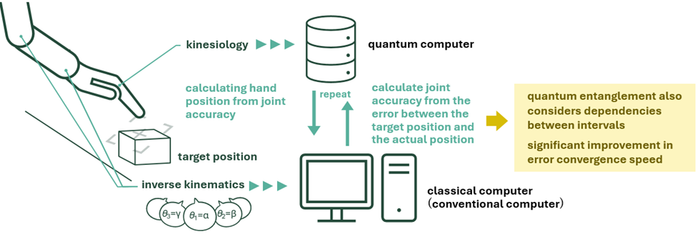
Thông thường, khi robot di chuyển, máy tính của nó phải tính toán cách các khớp nối phải uốn cong để tay hoặc chân dừng lại ở đúng vị trí cần thiết. Quá trình này, được gọi là động học nghịch, rất phức tạp đối với robot hình người vì có vô vàn khả năng kết hợp xảy ra. Máy tính truyền thống phải tính toán thử và sai, tiêu tốn thời gian và tài nguyên tính toán.
Nhóm nghiên cứu đã áp dụng qubit để mô phỏng vị trí và hướng của từng bộ phận robot. Họ cũng sử dụng rối lượng tử, một đặc tính của cơ học lượng tử, trong đó các hạt được kết nối với nhau, sao cho chuyển động của một hạt tác động đến các hạt còn lại. Điều này mô phỏng chính xác cách các khớp robot hoạt động, nơi chuyển động của một khớp sẽ ảnh hưởng đến các khớp nối liền.
Một điểm đặc biệt của nghiên cứu này là sự kết hợp giữa máy tính cổ điển và máy tính lượng tử. Trong khi động học thuận - tính toán vị trí cuối cùng của các bộ phận robot dựa trên các góc khớp nhất định - được xử lý bởi mạch lượng tử, động học nghịch vẫn được giải quyết trên máy tính cổ điển. Cách tiếp cận này giúp tận dụng tốc độ của máy tính lượng tử đồng thời giữ được tính ổn định từ phương pháp thông thường.
Nhờ vào cách tiếp cận này, nhóm nghiên cứu đã giảm đáng kể số phép tính cần thiết. Các thử nghiệm trên máy mô phỏng lượng tử của Fujitsu cho thấy phương pháp này giảm lỗi tới 43% so với các phương pháp truyền thống và thực hiện nhanh hơn. Họ còn xác nhận kết quả bằng cách sử dụng máy tính lượng tử 64-qubit được phát triển cùng với RIKEN.

Máy tính lượng tử Fujitsu hợp tác cùng RIKEN
Trong một thí nghiệm, nhóm nghiên cứu đã thử tính toán chuyển động của robot toàn thân với 17 khớp, giống như con người. Bình thường, việc này sẽ cần một lượng tính toán khổng lồ và mất khoảng 30 phút để hoàn thành.
Bước đột phá này có ý nghĩa to lớn vì các robot trong tương lai, đặc biệt là robot hình người làm việc gần gũi với con người, cần có khả năng di chuyển linh hoạt, phản ứng nhanh chóng và xử lý môi trường phức tạp trong thời gian thực. Các phương pháp hiện tại thường phải giảm bớt độ phức tạp của mô hình, chẳng hạn như giảm số lượng khớp từ 17 xuống còn 7, dẫn đến chuyển động bị gượng ép và thiếu tự nhiên.
Với phương pháp mới dựa trên máy tính lượng tử, việc tạo ra những chuyển động mượt mà và tự nhiên cho robot giờ đây có thể thành hiện thực. Điều tuyệt vời là phương pháp này đã có thể vận hành trên các máy tính lượng tử NISQ hiện nay – mặc dù chưa hoàn thiện nhưng đủ khả năng xử lý một số vấn đề nhất định.
Về lâu dài, công nghệ này có thể hỗ trợ robot thực hiện các nhiệm vụ điều khiển thời gian thực, như tránh vật cản, thao tác nhiều khớp và tối ưu hóa năng lượng. Các nhà nghiên cứu cũng tin rằng, nếu kết hợp với các thuật toán lượng tử tiên tiến, chẳng hạn như biến đổi Fourier lượng tử, tốc độ tính toán có thể được gia tăng mạnh mẽ hơn nữa.
Bằng cách kết hợp máy tính lượng tử và robot học, nhóm nghiên cứu đã đạt được một bước tiến lớn hướng đến việc phát triển thế hệ robot thông minh, gần gũi với con người hơn. Takuya Otani từ Viện Công nghệ Shibaura và Atsuo Takanishi từ Đại học Waseda đã cùng hợp tác trong nghiên cứu này, với sự tham gia của Nobuyuki Hara, Yutaka Takita và Koichi Kimura từ Fujitsu Limited. Thành tựu này mở ra một tương lai đầy triển vọng cho các robot có thể tương tác tự nhiên và hiệu quả hơn với con người.