
Trong những năm gần đây, nhiều công ty và trường đại học trên toàn cầu đã đầu tư mạnh mẽ vào việc nghiên cứu và phát triển các robot có hình dáng con người.
Các nhà khoa học từ Đại học Carnegie Mellon (CMU) và NVIDIA đã cùng nhau phát triển một phương pháp huấn luyện tiên tiến, cho phép robot hình người thực hiện những động tác thể thao phức tạp với độ chính xác và linh hoạt chưa từng thấy. Nhờ công nghệ này, robot có thể mô phỏng lại các động tác nổi tiếng như cú xoay người ăn mừng của Cristiano Ronaldo hay vũ đạo trong bài hát "APT" của ROSÉ.
Nền tảng công nghệ đằng sau thành tựu này là ASAP (Aligning Simulation and Real Physics), một hệ thống giúp giảm thiểu khoảng cách giữa mô phỏng và thực tế. Trước đây, việc robot thực hiện các chuyển động phức tạp một cách nhịp nhàng và linh hoạt luôn là thách thức lớn do sự khác biệt giữa mô phỏng và vật lý thực tế.
ASAP hoạt động bằng cách huấn luyện các chính sách theo dõi chuyển động trong môi trường mô phỏng, sử dụng dữ liệu từ chuyển động của con người. Sau đó, hệ thống được áp dụng vào thực tế để thu thập dữ liệu và điều chỉnh mô hình sao cho phù hợp hơn với các quy luật vật lý thực tế.
Nhờ công nghệ này, robot có thể thực hiện chính xác nhiều động tác đặc trưng của các huyền thoại thể thao, bao gồm cú xoay người 180 độ "Siu" của Ronaldo, động tác ăn mừng "Silencer" của LeBron James với tư thế thăng bằng trên một chân, và cú ném fadeaway của Kobe Bryant, đòi hỏi kỹ năng nhảy và tiếp đất bằng một chân. Ngoài ra, robot còn có thể thực hiện các bước nhảy xa hơn 1 mét theo nhiều hướng.
Mặc dù nhìn bề ngoài, các robot này vẫn còn hơi vụng về, nguyên nhân chủ yếu là do hạn chế về phần cứng – chúng không có đủ khớp linh hoạt như con người. Tuy nhiên, chúng vẫn thể hiện độ linh hoạt vượt trội so với các thế hệ robot trước nhờ vào cơ chế mới mang tên "delta action model". Đây là một thuật toán giúp bù đắp sự sai lệch giữa mô phỏng và thực tế, cho phép robot điều chỉnh chuyển động một cách linh hoạt hơn.
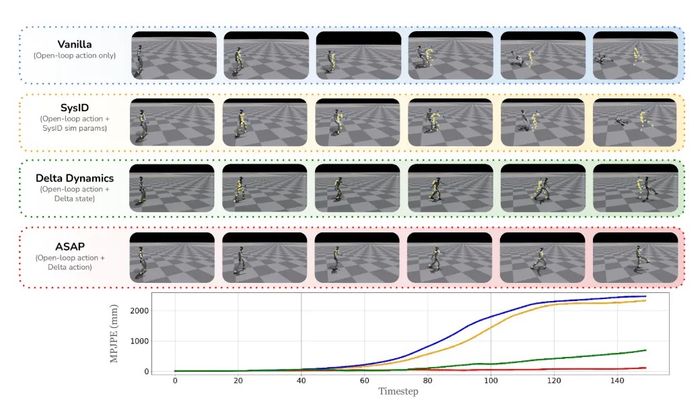
Nhờ kỹ thuật này, các nhà nghiên cứu đã giảm được 52.7% lỗi theo dõi chuyển động so với các phương pháp trước, mở ra tiềm năng giúp robot hình người thực hiện những chuyển động từng được xem là không thể.
Hướng đi mới cho robot hình người
Phát triển robot với độ linh hoạt cao luôn là một trong những thách thức lớn nhất trong ngành robot. Trong nhiều thập kỷ, nghiên cứu về robot hình người chủ yếu tập trung vào khả năng di chuyển, xem chân chỉ là công cụ để di chuyển từ điểm A đến điểm B. Tuy nhiên, ASAP huấn luyện robot bằng cách mô phỏng cách con người vận động toàn thân, cho phép nó sử dụng các chi để di chuyển, giữ thăng bằng, tạo đối trọng và thực hiện các động tác phức tạp.
Tái tạo các chuyển động thể thao không hề dễ dàng. Khi thực hiện một động tác thể thao – dù là cơ bản nhất, con người phải liên tục điều chỉnh nhiều yếu tố trong thời gian thực, cân bằng các lực khác nhau trong khi điều chỉnh động lượng và vị trí cơ thể. Để làm điều này với robot, các nhà nghiên cứu phải xử lý hàng trăm phép tính động lực học phức tạp trong từng khoảnh khắc.
Một ví dụ điển hình cho sự phức tạp này là trò chơi QWOP, nơi người chơi phải điều khiển bốn khớp để giúp một vận động viên chạy. Nếu bạn từng dành hàng giờ để cố gắng di chuyển nhân vật trong QWOP, hãy tưởng tượng mức độ khó khăn khi phải điều khiển đồng thời 21 khớp cơ bản trong hệ thống ASAP, trong khi cơ thể con người thực sự có hơn 300 khớp hoạt động cùng lúc.
Những năm gần đây, nhiều công ty và trường đại học trên thế giới đã đầu tư mạnh mẽ vào nghiên cứu và phát triển robot hình người. Tesla với dự án Optimus, Figure AI với mẫu robot mới công bố, hay Atlas của Boston Dynamics đều là những minh chứng cho sự quan tâm ngày càng lớn trong lĩnh vực này.
Về mặt học thuật, các trường đại học như Stanford và Đại học Bristol cũng đã phát triển các phương pháp riêng để nâng cao tính linh hoạt và khả năng thích ứng của robot.
Tương lai của ASAP: Robot thể thao hay robot lao động?
Nhóm nghiên cứu từ CMU và NVIDIA chia sẻ rằng họ sẽ tiếp tục cải tiến ASAP với mục tiêu giúp robot thích nghi tốt hơn với môi trường thực tế. Một trong những hướng đi chính là phát triển khả năng phát hiện hư hỏng, cho phép robot tự điều chỉnh để giảm thiểu rủi ro về phần cứng trong quá trình hoạt động.
Bên cạnh đó, nhóm nghiên cứu cũng hướng đến việc tập trung vào công nghệ nhận diện tư thế không cần đánh dấu (markerless pose estimation) và tích hợp cảm biến, nhằm giảm bớt sự phụ thuộc vào hệ thống theo dõi chuyển động (MoCap) hiện tại.
Tuy nhiên, vẫn còn nhiều câu hỏi chưa được giải đáp. Một trong số đó là liệu công nghệ này có thể được áp dụng rộng rãi trong thực tế hay không. Trong tương lai, khi robot trở nên linh hoạt hơn, chúng có thể được sử dụng không chỉ trong nghiên cứu mà còn trong các lĩnh vực như công nghiệp, y tế, thể thao, và thậm chí là giải trí.
Liệu có ngày chúng ta sẽ chứng kiến một kỳ World Cup dành riêng cho robot? Điều này vẫn còn là một bí ẩn, nhưng với tốc độ phát triển hiện tại, khả năng này không còn quá xa vời.